Robotic arms are programmable machines that use motors, sensors, and controllers to move with precise, repeatable motion. They build cars, pack food, and assist in surgery, bringing accuracy to tasks across factories and hospitals.
Patented in 1954 and first installed at GM in 1961, Unimate kicked off the robotic arm era. Fast-forward to 2025, and arms now range from heavy-duty models welding car frames to compact desktop systems in labs and workshops.
Today, millions of robotic arms operate worldwide, welding steel frames, stacking pallets, or assisting surgeons with steady, computer-guided motions. From industrial giants to compact desktop versions, robotic arms are becoming one of the most versatile tools of modern automation.
How do robotic arms work?
A robotic arm works by turning energy into motion through actuators, joints, controllers, and sensors. Motors provide power, actuators act as muscles, joints and links guide movement, and sensors give feedback to keep every motion accurate.
This happens through a chain of steps where each part plays a role:
- Energy input sets everything in motion. Most arms use electric motors because they are efficient and easy to control, though some rely on hydraulic or pneumatic systems for heavier tasks.
- Actuators act like muscles. They convert that energy into mechanical force, which drives the movement of joints and links.
- Joints and links shape the motion. Each robot joint works like a human elbow or wrist, while the links serve as bones. They create a flexible structure that can bend, rotate, or extend.
- Controllers send the commands. They decide how each actuator and joint should move, ensuring the arm follows a planned path.
- Sensors close the loop. By measuring position, speed, and torque, sensors feed data back to the controller, allowing the arm to adjust itself in real time.
The result is precise output. This robotic arm mechanism lets the arm perform welding, assembly, or packaging with repeatability down to fractions of a millimeter.
Robotic arms: Overview
A robotic arm is a programmable mechanical device, similar to a human arm. It consists of segments connected by joints to perform tasks like manufacturing, assembly, and medical procedures with precision and speed.
What makes robotic arms so important is their range. The same basic design can weld steel on a car line, assemble tiny circuit boards, or assist a surgeon in the operating room. That flexibility is why they’ve moved beyond factories into logistics, healthcare, research labs, and even small workshops.
Common types of robotic arms include:
- SCARA arms are fast and precise arms ideal for pick-and-place or small assembly tasks.
- Delta arms are lightweight, spider-like arms designed for ultra-fast packaging and sorting tasks.
- Cartesian arms are linear arms that move along X, Y, and Z axes, often used in 3D printing or CNC automation.
- Collaborative arms (cobots) are safe-to-use arms built for working alongside people without heavy safety barriers.
- Articulated arms are the most common design, with rotary joints that give them human-like flexibility for welding, painting, and assembly.
Key components of a robotic arm
The key components of a robotic arm include the structure, actuators, controller, sensors, and end effector. Each of these parts works together to create a machine that can move with precision and perform complex tasks.
How do robotic arms move?
Robotic arms move through kinematics, path planning, and control systems that coordinate every joint and link. These principles allow the arm to follow precise paths, whether assembling electronics or welding steel frames.
- Kinematics: Kinematics defines how joint angles place the end effector. Forward kinematics calculates where the tool will end up from current positions, while inverse kinematics works backward to reach a target. Together, they allow arms to hit exact coordinates with accuracy.
- Path planning: Path planning computes a smooth, collision-free trajectory that balances speed and safety, In industrial environments, advanced planning ensures that the arm can work around obstacles while maintaining cycle times.
- Step-by-step control: Control systems make sure the arm follows the planned path. Controllers send signals to actuators, which move the joints in sequence. Sensors provide feedback on torque, speed, and position, allowing real-time corrections.
This closed loop is what enables robotic arms to repeat the same motion thousands of times with micrometer precision.
Programming and controlling robotic arms
Programming and controlling robotic arms is done through teach pendants, direct programming, and artificial intelligence. These methods define how the arm learns, adapts, and executes tasks with precision.
- Teach pendants: Operators guide the arm step by step and save the motions as a program. It’s simple and requires no code, but building long sequences takes time.
- Direct programming: Engineers define motions in software (e.g., Python, C++, or vendor languages) and integrate sensors or machines, enabling higher automation and custom logic.
- Artificial intelligence: Vision and machine learning let arms recognize objects, adjust grip, and refine paths on the fly, which shortens setup and improves performance in changing environments.
Industrial robotic arms and examples
Industrial robotic arms are used for welding, assembly, packaging, palletizing, and many other factory automation tasks. They are designed to repeat motions at high speed while maintaining accuracy. From flexible cobots to heavy-duty welders, industrial robotic arms now cover every scale of manufacturing.
Standard Bots Core
.png)
Standard Bots Core is a six-axis collaborative arm designed for small and mid-sized manufacturers. Unlike heavy-duty robots built for large automotive plants, Core focuses on affordability and flexibility. It supports an 18 kg payload with a reach suited for CNC machine tending, palletizing, and light assembly.
With ±0.025 mm repeatability, it delivers the precision needed for electronics or machining tasks at a cost of $37K, about half the price of traditional industrial arms. Built-in vision and collision detection also make it safe to operate alongside people, eliminating the need for bulky cages.
Standard Bots Core shows how cobots are making advanced automation accessible to smaller workshops that previously couldn’t afford it.
FANUC M-20iB/25
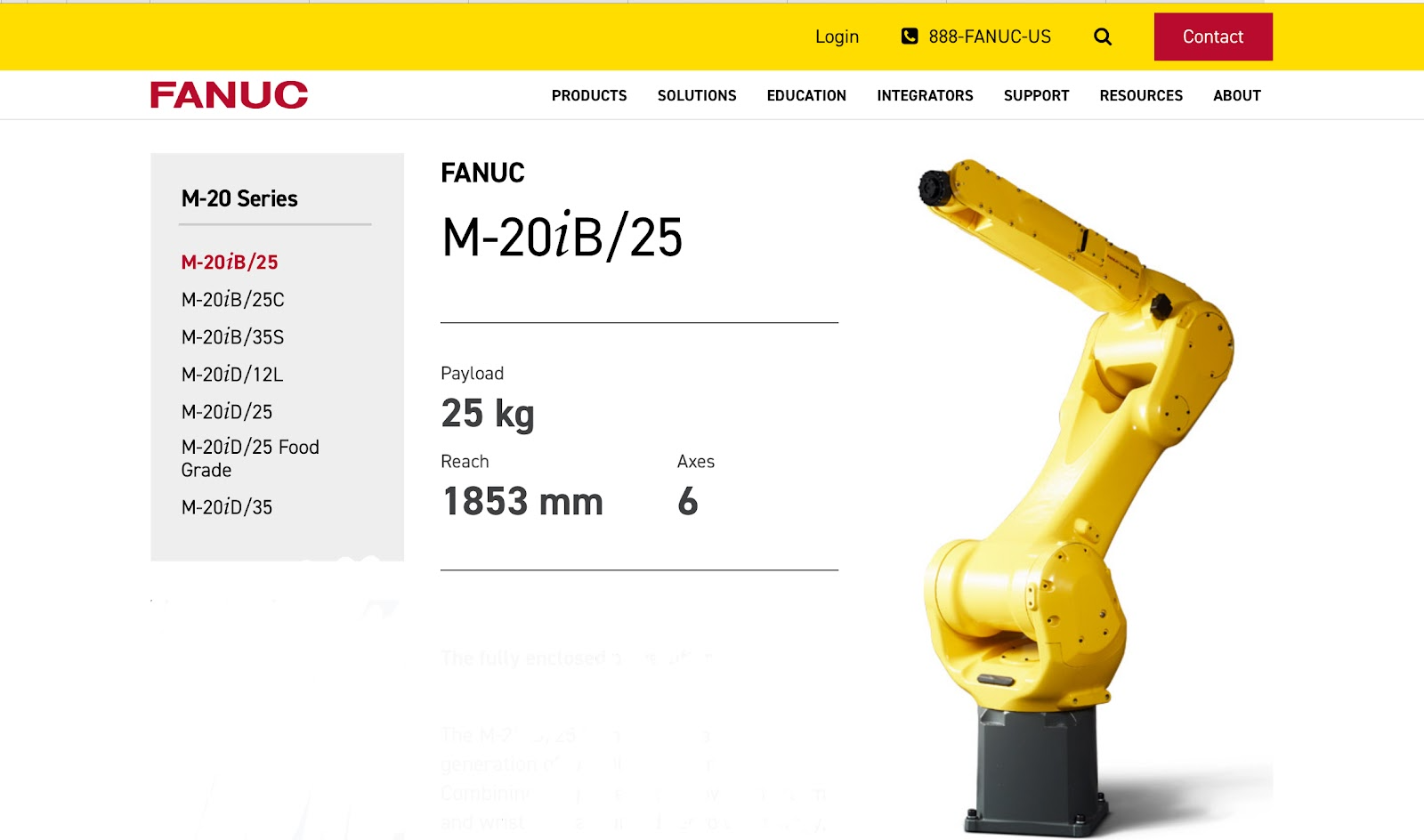
The FANUC M-20iB/25 is part of FANUC’s active M-20 series and is widely used for material handling, assembly, and packaging. It supports a 25 kg payload with a reach of 1.85 m, giving it more capacity and range than its predecessor. With ±0.02 mm repeatability, it delivers high precision, making it suitable for electronics assembly, machine tending, and packaging lines where accuracy and speed are equally important.
The arm’s slim, lightweight design reduces interference with peripheral equipment, while its enclosed wrist protects cables and hoses, lowering maintenance needs.
Manufacturers in automotive, consumer goods, and logistics choose the M-20iB/25 because it combines versatility with FANUC’s well-known reliability.
ABB IRB 2600
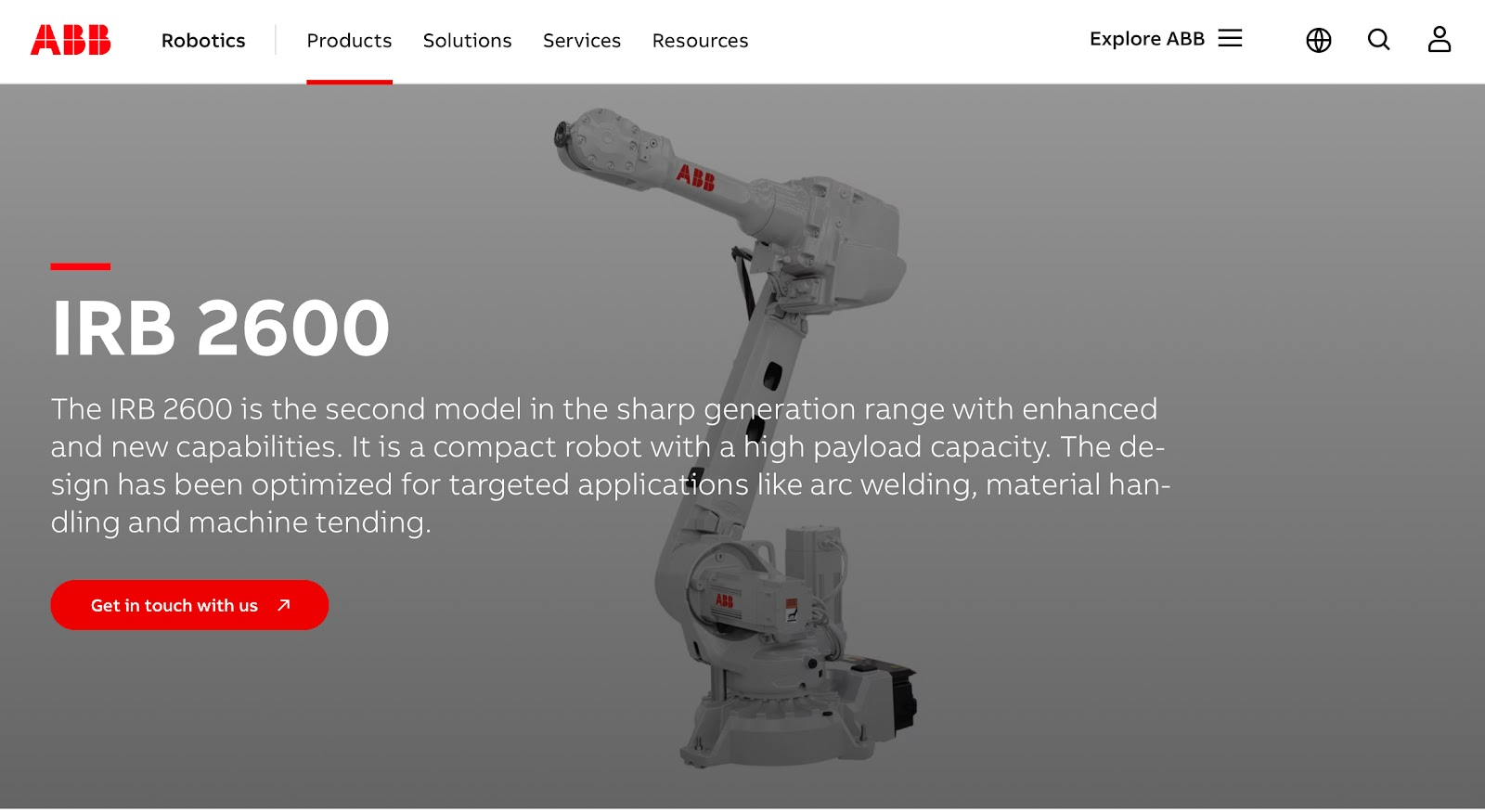
The ABB IRB 2600 supports payloads up to 20 kg and offers a reach of 1.65 m. It is compact and fast, making it well-suited to welding, machine tending, and smaller assembly jobs. ABB’s motion control software enhances path accuracy, which is important for welding seams or placing components in tight spaces.
The slim design allows it to fit into crowded production lines, and its flexible mounting options make integration easier in plants with limited space. The IRB 2600 is often chosen by manufacturers who need high accuracy in confined areas, such as electronics or metal fabrication workshops.
KUKA KR QUANTEC
The KUKA KR QUANTEC series is designed for heavy-duty work. Payloads range from 90 to 300 kg with a reach up to 3.9 m. With ±0.05 mm repeatability, it can perform large-scale tasks such as spot welding car frames, palletizing heavy boxes, or handling oversized metal sheets.
Its modular design reduces the number of spare parts required and makes servicing faster, cutting downtime on production lines. Automakers use KR QUANTEC arms extensively in body shops, where strength and reach are critical.
Outside of automotive, they are used in logistics, foundries, and aerospace for heavy lifting with consistent accuracy.
Robotic arms beyond industry
Robotic arms beyond industry are found in healthcare, research, and even personal settings. These arms are adapted from their industrial counterparts but modified for safety, precision, and ease of use in environments where people interact directly with them.
- In healthcare, surgical robotic arms assist doctors with delicate procedures that demand stability. Systems like the da Vinci Surgical System use computer-guided movements to enable smaller incisions and faster recovery times. By filtering hand tremors, they give surgeons finer control.
- In research labs, robotic arms are essential for repetitive experiments, handling hazardous substances, or working in environments unsafe for humans. They provide accuracy in pipetting, material testing, and prototyping, freeing researchers to focus on analysis rather than manual repetition.
- At the consumer level, compact robotic arms are appearing in homes and small businesses. They handle tasks like 3D printing, light assembly, and assistive functions for people with mobility challenges. Educational models also let students learn coding and robotics through hands-on projects.
Final thoughts
Robotic arms have come a long way from the early days of Unimate. Today, they combine motors, sensors, and controllers to deliver precise, repeatable motion across industries.
From FANUC and ABB’s heavy-duty systems to accessible cobots like Standard Bots Core, robotic arms now cover every scale of manufacturing. Their versatility also extends into healthcare, research, and even homes, proving that this technology is no longer limited to factories.
The advantages are clear: precision, speed, and consistency. But challenges like cost, integration, and safety still shape how fast adoption spreads. As robotic arms continue to evolve, their balance of power and accessibility will define how deeply they integrate into everyday work and life.
Next steps with Standard Bots’ robotic solutions
Looking to upgrade your automation game? Standard Bots Thor is built for big jobs, while Core is the perfect six-axis cobot addition to any automated operation, delivering unbeatable throughput and flexibility.
- Affordable and adaptable: Core costs $37K. Thor lists at $49.5K. Get high-precision automation at half the cost of comparable robots.
- Perfected precision: With a repeatability of ±0.025 mm, both Core and Thor handle even the most delicate tasks.
- Real collaborative power: Core's 18 kg payload conquers demanding palletizing jobs, and Thor's 30 kg payload crushes heavy-duty operations.
- AI-driven simplicity: Equipped with AI capabilities on par with GPT-4, Core and Thor integrate smoothly with manufacturing operations for advanced automation.
- Safety-first design: Machine vision and collision detection mean Core and Thor work safely alongside human operators.
Schedule your on-site demo with our engineers today and see how Standard Bots Core and Thor can bring AI-powered greatness to your shop floor.
FAQs
1. How does a robotic arm work in simple terms?
In simple terms, a robotic arm works by copying the way a human arm moves, but with motors instead of muscles. Actuators power the joints, which are linked together like bones, so the arm can bend, rotate, and extend. A controller acts as the brain, telling each joint how to move, while sensors provide constant feedback to keep the motion accurate.
This closed-loop system of command, movement, and correction allows robotic arms to pick, weld, paint, or assemble with repeatable precision. For a full breakdown of the robotic arm mechanism, explore our guide.
2. What are the main components of a robotic arm?
The main components of a robotic arm are the mechanical structure, actuators and motors, controller, sensors, and the end effector. The structure provides the skeleton made up of links and joints, while actuators deliver the force that drives motion.
The controller processes commands and ensures each joint moves correctly, and sensors monitor torque, speed, and position to make real-time corrections. The end effector is the tool that performs the task, such as gripping, welding, or painting.
3. How are robotic arms controlled and programmed?
Robotic arms are controlled and programmed using teach pendants, direct coding, or artificial intelligence. Teach pendants allow an operator to manually guide the arm through a sequence of movements, which can then be stored and repeated.
Direct coding uses software to define precise paths and integrate the arm with other systems like CNC machines or vision sensors, while AI-based control adds adaptability, letting arms recognize objects or optimize movements on their own.
4. What is the difference between industrial robotic arms and collaborative arms?
The difference between industrial robotic arms and collaborative arms is in their design, speed, and safety. Industrial arms are powerful, built to work at high speeds and heavy payloads, but they require safety cages or barriers to protect workers.
Collaborative arms, or cobots, are engineered with force sensors, rounded edges, and slower movements, making them safe to work directly alongside people. Cobots are best for flexible tasks in small shops, research labs, or light assembly, while industrial arms dominate automotive, welding, and large-scale manufacturing.
5. What tasks can robotic arms perform?
Robotic arms can perform a wide variety of tasks depending on the tool, or end effector, attached at the wrist. In factories, they weld car bodies, assemble electronics, package goods, palletize boxes, and paint surfaces. In healthcare, robotic arms assist in delicate surgeries by giving surgeons more control and precision than the human hand allows.
In research and personal use, compact arms can handle 3D printing, assistive functions, or repetitive lab tasks. Their flexibility makes them one of the most widely adopted tools in automation.
6. What is the working principle of robotic arms?
The working principle of robotic arms is to transform energy into precise movement through actuators, joints, and controllers. Electric, hydraulic, or pneumatic power drives actuators, which move the joints and links like muscles and bones. The controller directs these movements, while sensors constantly measure torque, speed, and position, feeding corrections back into the system.
This creates a feedback loop that keeps the arm accurate even during fast or complex tasks. As a result, robotic arms can handle delicate micro-assembly as well as heavy-duty welding with the same repeatable precision.
brighter future

Join thousands of creators
receiving our weekly articles.