Robots roll across factory floors, reach into CNC machines, and weld with millimeter accuracy by relying on controlled, precise motion. In 2023 alone, more than 500,000 industrial robots were installed worldwide, each using these movement principles to work safely and efficiently.
What is robot movement?
Robot movement, also known as robotic locomotion, encompasses the various ways robots move from one point to another. It involves the physical motion and mobility of robots, which is determined by their configuration and joints.
All robot movement falls into two fundamental categories:
- Locomotion: When the robot moves its entire body or base to a new position.
- Manipulation: When the robot uses joints, arms, and tools to move or interact with other objects without relocating its base.
Mechanical constraints (like joint types), control systems (like motion planning algorithms), and environmental demands (such as obstacle avoidance or tool accuracy) govern these motion types.
For instance, robots designed for CNC machine tending need to reach into enclosed workspaces without colliding with machines or humans. You can see how this works in how CNC machine tending robots are programmed, which highlights how different types of motion are optimized for reliability and safety in tight, industrial environments.
Locomotion: How robots move themselves
Locomotion allows robots to travel from one point to another, either within a predefined workspace (like a factory floor) or through more dynamic environments (like warehouses, hospitals, or disaster zones). Locomotion is shaped by the environment and task, and can be implemented in several ways:
1. Wheeled motion
Wheeled robots are the most common in industrial automation due to their mechanical simplicity and energy efficiency. Most warehouse robots and autonomous guided vehicles (AGVs) use differential drive, two independently powered wheels, and one or more passive castors.
They’re fast, stable on smooth surfaces, and ideal for predefined path systems like logistics routes or conveyor integration. However, they struggle on uneven terrain or in environments with debris.
2. Legged motion
Legged robots use limbs to walk, hop, or climb. These can be bipedal, like humanoids, or quadrupedal, like Boston Dynamics’ Spot.
Legs provide much greater flexibility for movement across rough terrain, stairs, or environments where wheels can’t reach. Each leg typically uses multiple joints, meaning higher degrees of freedom but also higher complexity.
The tradeoff here is energy use. A study shows that legged robots consume up to 100 times more energy than wheeled ones over flat ground. They also require advanced control systems for dynamic balance and path correction.
3. Tracked motion
Tracked robots use continuous belts like those found on tanks. Tracks distribute weight over a larger area, improving grip on loose or soft terrain.
Search and rescue missions, pipeline inspections, and off-road industrial monitoring find these robots ideal. Their design makes them better at handling inclines and obstacles, but they tend to move more slowly and are less energy efficient than wheels.
4. Omnidirectional wheels
Omnidirectional wheels, also called Mecanum or Swedish wheels, let robots move in any direction, including forward, sideways, diagonally, or rotating in place without changing orientation.
This form of locomotion is useful in environments like hospitals, packaging plants, and collaborative manufacturing stations. The tradeoff is lower traction and energy efficiency, especially under heavier payloads.
RO1 doesn’t use omnidirectional drive by default, but it can be integrated into a mobile base with Mecanum wheels for pick-and-place tasks in flexible factory layouts, allowing it to navigate and operate tools in one compact footprint.
5. Aerial and underwater motion
Aerial and underwater motion refers to how robots operate in environments where rolling or walking isn’t possible, such as in the air or underwater.
- Aerial robots (drones) use propellers and adjust pitch, yaw, and roll via flight controllers and IMUs (inertial measurement units)
- Underwater robots rely on thrusters and buoyancy systems to move in 3D space while compensating for current and drag
Inspection, environmental monitoring, and defense commonly use these robots. Because they operate in fluid environments, they must constantly adjust their position using feedback from gyros, accelerometers, sonar, or vision sensors.
Manipulation: How robots move objects
Manipulation is how robots move or act on objects using robotic arms, joints, or end-effectors.
While locomotion moves the robot from one place to another, manipulation focuses on tasks like picking, placing, welding, packaging, assembling, or testing. This is where most industrial robots direct their capabilities.
Two elements that drive manipulation:
- The physical configuration of the robot (number and type of joints, reach, payload)
- The controller logic that moves each joint to perform a coordinated motion
There are several standard architectures for robotic manipulators, each optimized for specific types of work.
If you’re trying to understand how these designs work and what they’re best suited for, this guide to manipulator robots provides a great overview.
Let’s explore the major ones:
1. Articulated robots
Articulated arms use rotary joints to mimic the flexibility of a human arm. These joints can rotate in one or more axes, giving the arm significant freedom of movement. Articulated robots are the most common manipulator type in industrial robotics.
A classic example is a 6-axis robotic arm that can reach, rotate, and orient its tool head in any position. Machine tending, welding, and assembly commonly use these arms.
2. SCARA robots
SCARA robots (Selective Compliance Assembly Robot Arm) operate primarily in the horizontal plane and are ideal for high-speed, repeatable tasks like pick-and-place or small part assembly.
Their selective compliance allows them to be rigid in the Z-axis while maintaining flexibility in X and Y, which makes them perfect for tasks requiring speed and precision.
3. Delta robots
Delta robots, also called parallel-link robots, use multiple arms connected to a common platform to perform high-speed, lightweight movements. Their design enables very fast cycle times with minimal weight on moving parts, making them ideal for tasks like food packaging and electronics sorting.
4. Cartesian (gantry) robots
Cartesian robots move along three linear axes: X, Y, and Z using prismatic joints. They are incredibly precise and scalable, which makes them suitable for large-volume tasks like 3D printing, CNC milling, and automated warehouse systems.
For a full breakdown of these types, you can read the six manipulator types used in robotics.
5. Cylindrical robots
Cylindrical robots combine a rotary base with vertical prismatic motion, allowing them to operate in a cylindrical workspace. They’re often used in situations where compactness and vertical reach are more important than full spatial orientation, such as assembly line material handling.
6. Spherical (or polar) robots
Spherical robots use a combination of two rotary joints and one prismatic joint to create motion in a spherical workspace. Machine tending and arc welding suit them well, since the tool needs to be rotated and extended at various angles from a single pivot point.
Each of these architectures is tailored to different workspace shapes, load requirements, and motion complexity. Selecting the right one depends on the task, environment, and how flexible or constrained the system needs to be.
Degrees of freedom (DoF) in robotics
Degrees of freedom refer to the number of independent movements a robot can perform. In a 3D environment, a rigid body has six DoF: three for position (X, Y, Z) and three for orientation (roll, pitch, yaw).
Most industrial arms, like those used for CNC tending or welding, require at least 6 DoF to position and orient tools precisely in space.
A 6-axis robot typically has:
- 3 joints for spatial positioning
- 3 joints for end effector orientation
More complex systems like humanoid robots or flexible cobots may offer 7+ DoF to allow more natural or redundant movements, such as reaching around obstacles.
For a breakdown of how DoF affects robot capability, workspace, and control complexity, Robotic degrees of freedom is a highly useful reference.
What is motion in robotic arms?
In robotics, motion refers to the way a robotic arm moves its joints and links to position its end effector within a workspace. It is different from locomotion, which moves the entire robot. Arm motion depends on the number and type of joints, how those joints are arranged, and how they can move relative to each other.
The combination of these factors creates different motion patterns, or workspaces, such as straight‑line movement, rotation around a fixed point, or complex multi‑axis paths. Understanding these patterns is key to choosing the right arm design for a task, since each type of motion affects reach, flexibility, precision, and speed.
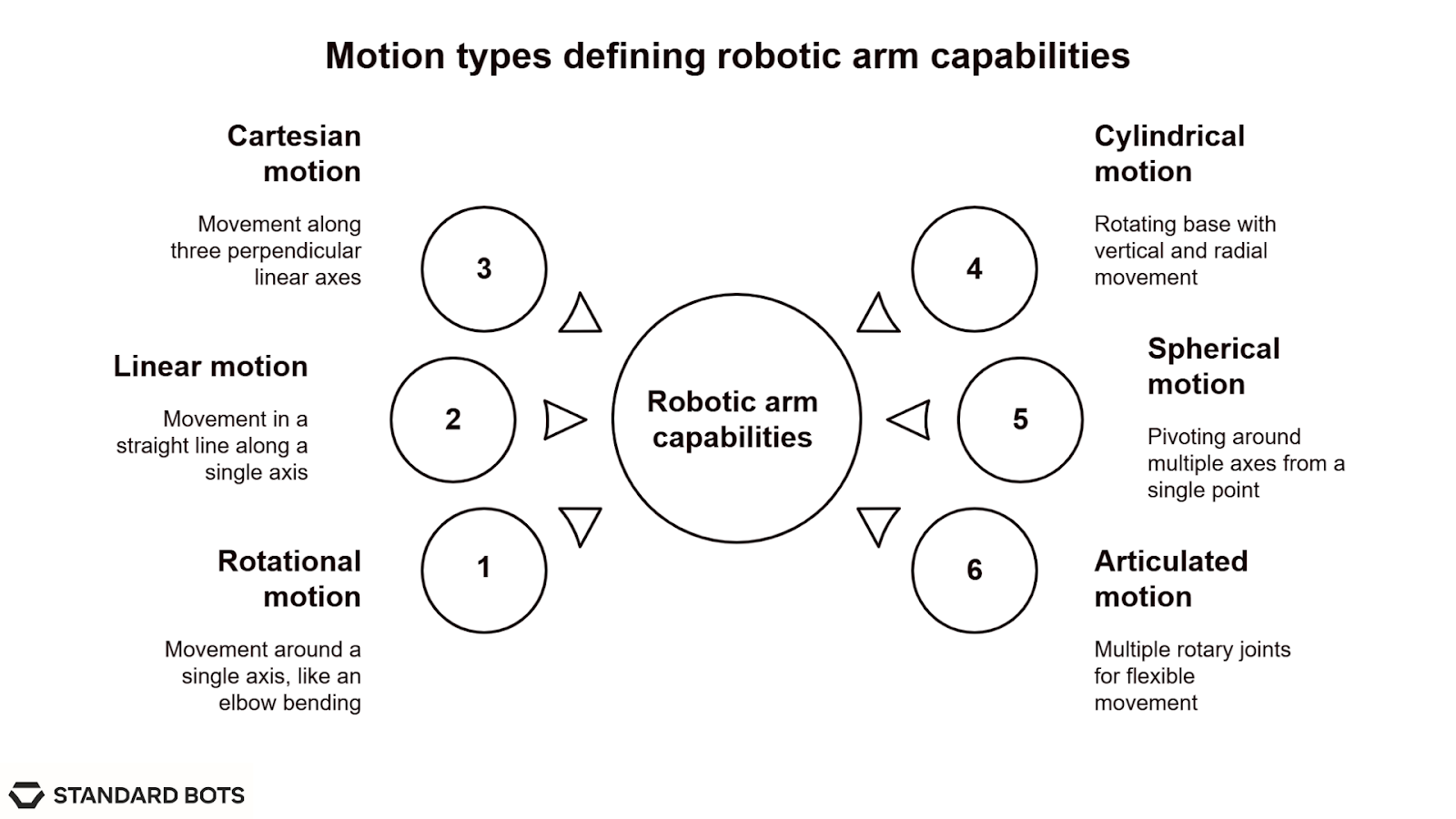
Six common motion types in robotic arms
Robotic arms use six motion types: rotational, linear, Cartesian, cylindrical, spherical, and articulated. These motions range from simple straight-line travel to complex multi-axis rotations, allowing robots to handle tasks that require both precision and flexibility.
To see how each motion type fits real use cases, our breakdown of robot joints walks through each configuration with examples and visuals.
Common joint types and their impact
Joints are the foundation of all robotic motion. They define how each part of the robot can move, how flexible the robot is, and what types of tasks it can perform.
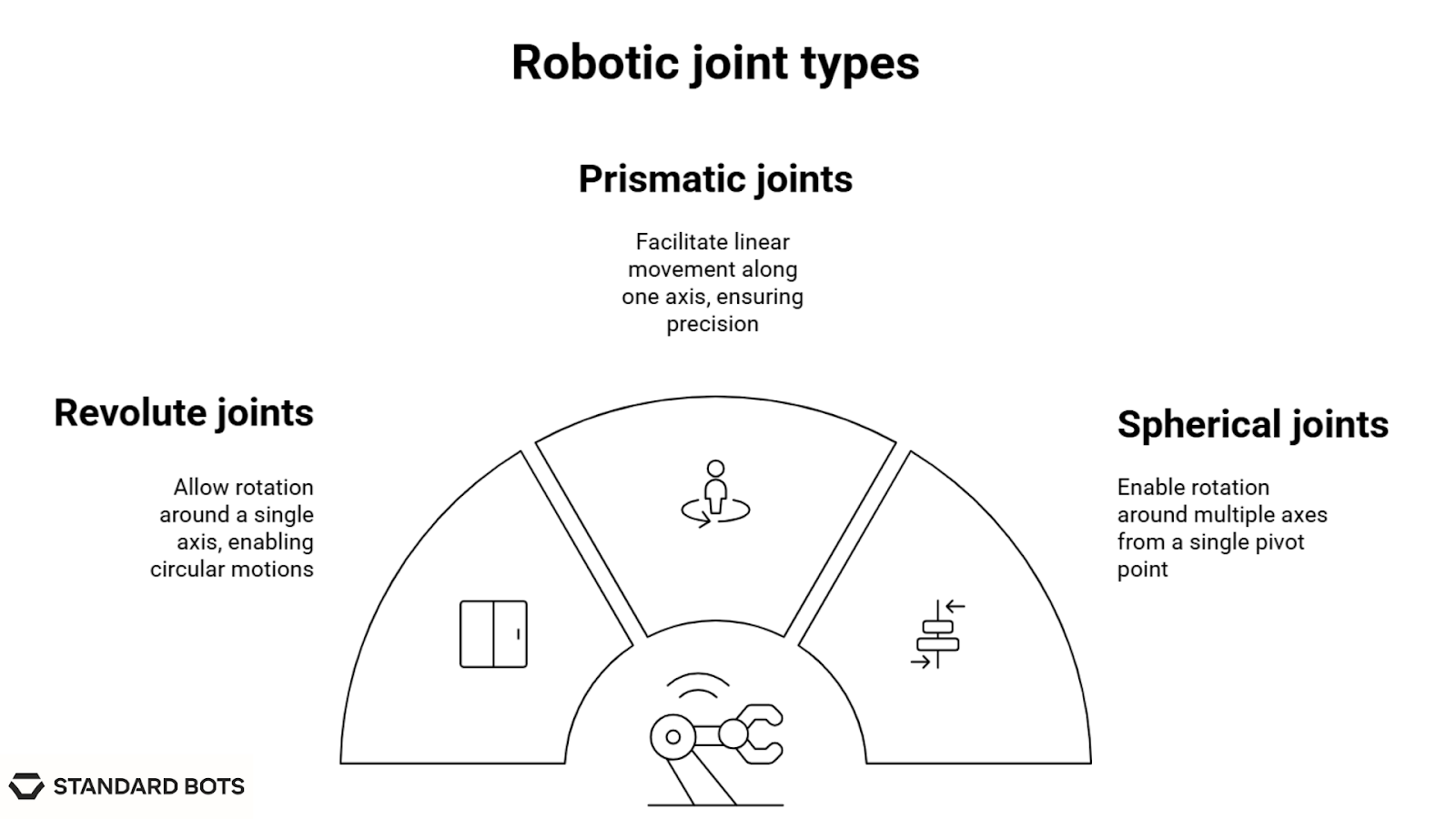
The most commonly used joint types in robotics include:
1. Revolute (R) joints
Revolute joints allow rotation around a single axis, much like a door hinge or a human elbow. They’re the backbone of most industrial arms, enabling circular or sweeping motions. For example, the shoulder and wrist of a 6-axis robot like RO1 use revolute joints to orient tools in all directions.
2. Prismatic (P) joints
Prismatic joints move in a straight line along one axis. They’re essential in gantry-style robots or systems that need high linear precision, like pick-and-place arms that slide trays or tools along a conveyor.
3. Spherical (S) joints
Spherical joints enable rotation around multiple axes from a single pivot point, similar to a human shoulder. They’re ideal for tools that need a wide angular range without changing position, such as robotic welders or painting bots.
Some robots use combinations of these joint types to maximize their workspace. For instance, an R-R-P configuration might provide both rotational flexibility and vertical reach.
Motion programming in industrial robots
What powers robot motion?
Motors and actuators
Most industrial robots use servo motors. These provide smooth motion, high torque, and real-time correction using encoder feedback. RO1, for example, uses servo motors to maintain sub-millimeter precision while welding, loading parts, or inspecting components.
Other motion systems include:
- Stepper motors, which are simpler and cheaper but less accurate
- Pneumatic actuators, ideal for lightweight or high-speed tasks
- Hydraulic actuators, built for heavy lifting or force-intensive operations
Motion controllers and safety systems
A robot’s motion is managed by a dedicated controller, such as a PLC or onboard CPU. These systems process sensor data, coordinate joint movements, and enforce safety protocols.
They also handle:
- Real-time path planning
- Collision prevention through force sensors or proximity feedback
- Integration with surrounding machines or factory equipment
Cobots, for example, often use torque-limited joints and vision zones to safely operate near humans without fencing.
Why motion planning matters
Motion planning matters because in manufacturing, every motion must be deliberate, calculated, and safe. Good planning reduces collisions, saves energy, and adapts to changing conditions in real time.
As robots take on more complex roles, motion planning is the backbone of reliable automation and the key to turning precise movements into consistent, productive results.
Ready to work with a robot that moves like no other?
RO1 by Standard Bots is built for both locomotion and manipulation. RO1 is the perfect six-axis cobot addition to any robotic setup, delivering unbeatable precision and flexibility.
- Affordable and adaptable: RO1 costs $37K (list). Get high-precision automation at half the cost of traditional robots.
- Precision and power: With a repeatability of ±0.025 mm and an 18 kg payload, RO1 handles even the most demanding CNC jobs.
- AI-driven simplicity: Equipped with AI capabilities on par with GPT-4, RO1 integrates with CNC systems for advanced automation.
- Safety-first design: Machine vision and collision detection mean RO1 works safely alongside human operators.
Schedule your on-site demo with our engineers today and see how RO1 can bring AI-powered greatness to your shop floor.
FAQs
1. What is the difference between robot locomotion and manipulator motion?
Locomotion refers to moving the entire robot (e.g., wheels, legs, or tracks), whereas manipulator motion refers to moving the robot’s joints or end effector to interact with objects. Locomotion deals with navigating environments, while manipulation focuses on tasks like welding or assembly.
2. Which joint type gives a robot the highest degrees of freedom?
Spherical joints give a robot the highest degrees of freedom, providing three rotational degrees of freedom at a single point. To achieve full spatial control, robots usually combine multiple revolute and prismatic joints into a six-DoF arm. The most common setup uses R-R-R joints in the shoulder, elbow, and wrist.
3. How does MoveJ differ from MoveL in industrial robot programming?
MoveJ commands produce a joint‑interpolated path, letting the robot choose the easiest route between points; they are faster and automatically avoid singularities. In contrast, MoveL commands enforce a straight‑line path in Cartesian space, providing precise tool control but requiring manual singularity avoidance and collision planning.
4. What role do servo motors play in robot movement?
Servo motors play an important role in robot movement by helping with precise control using feedback loops. They deliver high speeds, high torque, and position accuracy, making them the preferred choice for industrial and collaborative robots. Closed‑loop feedback allows them to adjust to load changes and reduces errors.
5. Why is motion planning critical for robot safety and efficiency?
Motion planning is critical for robot safety and efficiency because it enables robots to navigate complex environments and complete tasks without collisions, while also optimizing their movements for speed and energy consumption. By intelligently planning paths, robots can avoid obstacles, both static and dynamic, and adapt to changing conditions, leading to safer and more productive operation.
6. How many degrees of freedom does a typical collaborative robot have?
A typical collaborative robot (cobot) has 6 DoF, three joints for positioning and three for orientation. This configuration provides the flexibility needed to work with humans while keeping control complexity manageable.
7. Can a single robot combine multiple motion types within one task?
Yes, a single robot combines multiple motion types within one task. Such robots can move to a location and then perform manipulation tasks. Examples include warehouse picking robots and hospital delivery robots.
brighter future

Join thousands of creators
receiving our weekly articles.