As the industrial robotics market surpasses $16.5 billion in 2026, manufacturers are reevaluating how they’ll build cells, integrate tool paths, and staff for the future.
In modern plants, one robot might feed a CNC machine, and another might sculpt the surface of a part. That overlap raises a question: when do you use a machine tending robot, when do you invest in a machining robot, and can one do both?
What is a machine tending robot?
A machine tending robot is an industrial robot that automates the loading and unloading of parts into machinery, such as CNC machines, injection molding machines, and press brakes. Instead of cutting or shaping materials itself, it serves as an intelligent assistant that keeps production running without interruption.
Factories use machine tending robots to load CNC lathes and mills, then unload finished parts as each cycle ends.
By doing so, they help manufacturers improve uptime, reduce operator fatigue, and maintain consistent precision across every shift. With the right programming and gripper setup, machine tending robots can even manage multiple machines simultaneously, keeping production efficient day and night.
What is a machining robot?
A machining robot is an automated system that uses a programmable robotic arm to perform material removal tasks like milling, drilling, or grinding on a workpiece. Unlike a machine tending robot, which only moves parts between machines, a machining robot performs the actual material removal or finishing process itself.
These robots are used for a wide range of operations, including deburring, surface finishing, trimming, sanding, and drilling. They’re particularly valuable for tasks that demand precision but don’t justify the cost of a dedicated CNC machine, such as custom parts, complex contours, or low-volume production.
A single robot can switch between tools or materials with minimal setup changes, reducing handovers between workstations. With integrated force sensors and real-time path control, modern machining robots can achieve high-quality finishes that rival traditional equipment while taking up less space and manpower on the floor.
Machine tending robots vs. machining robots: What’s the difference?
Machine tending robots handle parts. Machining robots process them. The distinction defines system design, tooling, and ROI. These differences affect setup, cell layout, and long-term scalability. Selecting the right type ensures maximum uptime and the correct level of precision for your process.
Key characteristics and performance metrics
The key characteristics and performance metrics of machining and machine tending robots include precision, rigidity, speed, payload capacity, environmental resistance, and integration capability.
- Environmental resistance: Machining robots must withstand coolant and debris; tending robots need protection from heat and lubricants near machine doors.
- Rigidity and vibration control: Machining robots require rigid frames and damped joints to prevent chatter during cutting. Tending robots need balanced stiffness to handle repetitive movements without excessive wear.
- Payload and reach: Machine tending robots need higher payloads to lift metal parts and tool carriers, while machining robots prioritize stability and tool support.
- Speed and motion profile: Tending robots emphasize fast cycle transitions to reduce machine idle time, while machining robots control acceleration and path smoothing for consistent cutting pressure.
- Tool-change capability and end-effectors: Machining robots use automatic tool changers for sequential cutting or polishing operations. Tending robots rely on multi-grip systems or vacuum EOATs to switch between part sizes.
- Integration and feedback: Machining robots connect directly with spindle controllers and CAD/CAM toolpaths, using feedback from force sensors to maintain accuracy. Tending robots integrate through I/O mapping or Modbus to synchronize with CNC cycles.
- Precision and repeatability: Machining robots typically achieve ±0.03 mm to ±0.05 mm repeatability to maintain precise toolpaths and surface finishes. Machine tending robots maintain ±0.0 5mm to ±0.1 mm precision for reliable part loading and positioning.
Both Standard Bots Core (±0.025 mm) and Thor (±0.025 mm) exceed these standards, making them suitable for high-precision CNC tending and light machining.
Differences in programming and control
Machining robots rely on continuous path control, adaptive force feedback, and calibration systems, while machine tending robots use point-to-point logic designed for consistent handling and cycle timing.
- Programming model: Machining robots use CAM-generated toolpaths or interpolation software to follow continuous contours. Machine tending robots rely on teach-pendant or no-code interfaces to move between defined positions like loading and unloading points.
- Motion and trajectory control: Machining requires smooth, continuous motion to maintain tool engagement. Robots use motion blending and path smoothing to prevent chatter or gouging. Tending robots prioritize speed and repeatable positioning rather than contour accuracy.
- Adaptive force and feedback: Machining robots use force sensors and torque feedback to maintain cutting pressure and tool life. This allows them to compensate for material variation in real time.
- Calibration and error mapping: Machining accuracy depends on routine calibration and kinematic error mapping to maintain ±0.05 mm precision. Tending robots need simpler calibration for gripper alignment and pickup coordinates.
- Control architecture: Machining robots integrate spindle and tool controllers with closed-loop feedback for precision toolpaths. Machine tending robots operate mainly with open-loop I/O, synchronizing with machine signals like cycle start or door open.
- Software and integration: Machining robots connect with CAD/CAM systems and simulation tools for offline path planning. Tending robots use simpler drag-and-drop or step-based programming that operators can modify without code.
Benefits and trade-offs of machining and machine tending robots
The main benefits and trade-offs of machining and machine tending robots include productivity gains, improved safety, and flexibility on one side, and calibration demands, cost differences, and integration complexity on the other.
Benefits
Trade-offs
Applications and use cases of machine tending robots
The main applications of machine tending robots include CNC loading, press feeding, multi-machine handling, and part transfer.
CNC loading and unloading
.png)
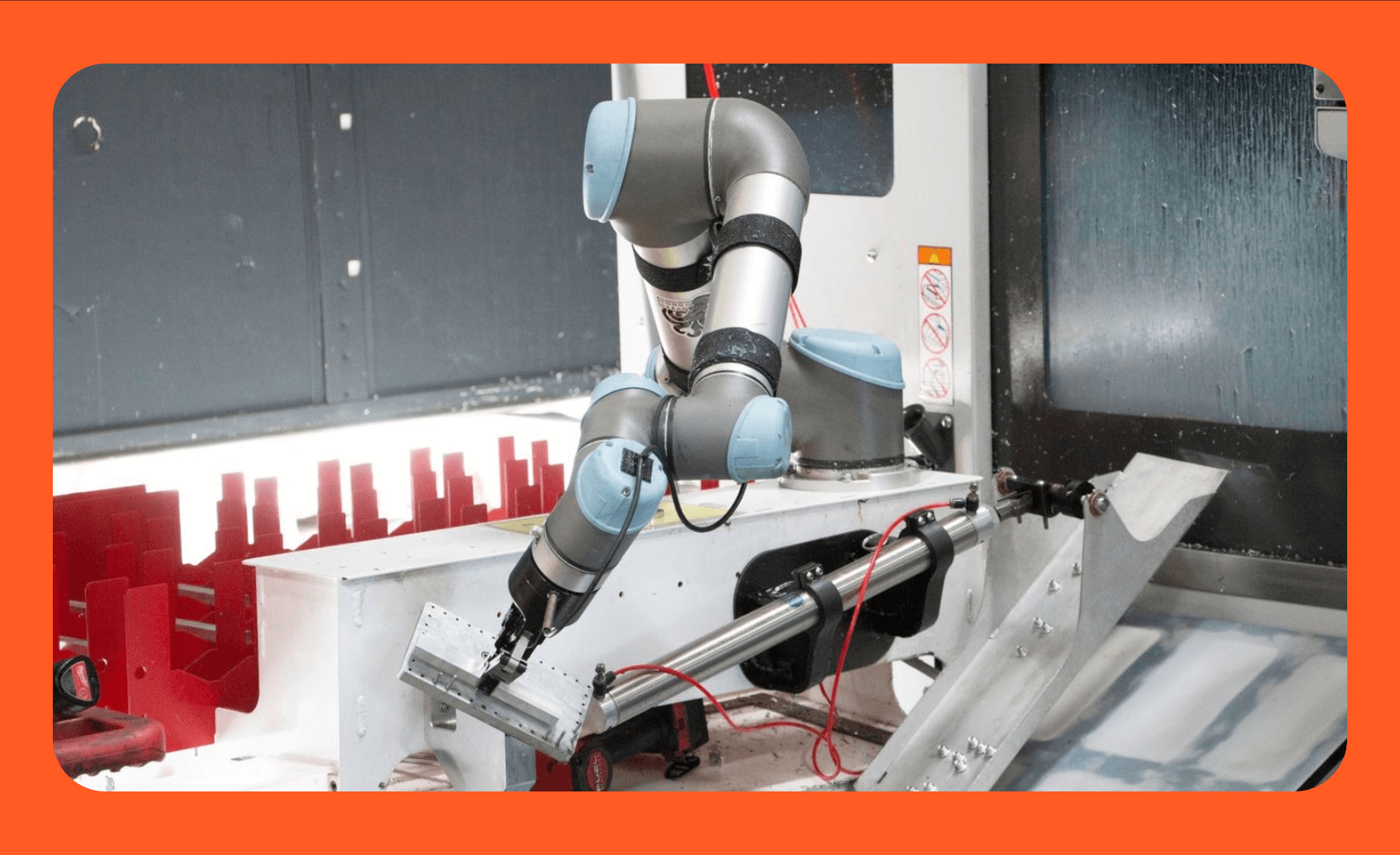
Machine tending robots are most commonly used for loading and unloading CNC machines. They pick up raw components, place them in lathes or milling machines, and remove finished parts when the cycle ends. This allows continuous operation without supervision, significantly reducing idle time.
A case study from APT Manufacturing Solutions shows parts per 8-hour shift rose from ~100 to 150+, and the effective cycle time fell by ~1 minute 30 seconds over the shift, thanks to consistent robot pacing.
Similarly, Standard Bots’ Core robot is designed to perform this type of operation in small and mid-sized facilities, handling up to 18 kg payloads with ±0.025 mm repeatability, and is ideal for continuous CNC production without operator intervention.
The Standard Bots machine tending package includes the Core robot, control box, workbench, and base. You can add single or dual grippers, pneumatic systems, or pedal and button pushers that integrate directly with your machine.
Additional options like automatic door openers, safety scanners, and air blow units are available to make the setup fully automatic.
Injection molding and press tending
In plastics and die-casting applications, robots handle repetitive and high-temperature processes that are unsafe for human operators. They extract molded parts from injection machines, trim runners, and load inserts into presses.
Collaborative robots like Standard Bots Core can perform these actions alongside human operators using built-in force sensors and machine vision, ensuring precision and safety.
Universal Robots notes that machine tending is one of the most common robot applications, and IFR reports that 44% of robots are used in parts-handling tasks.
Multi-machine part transfer
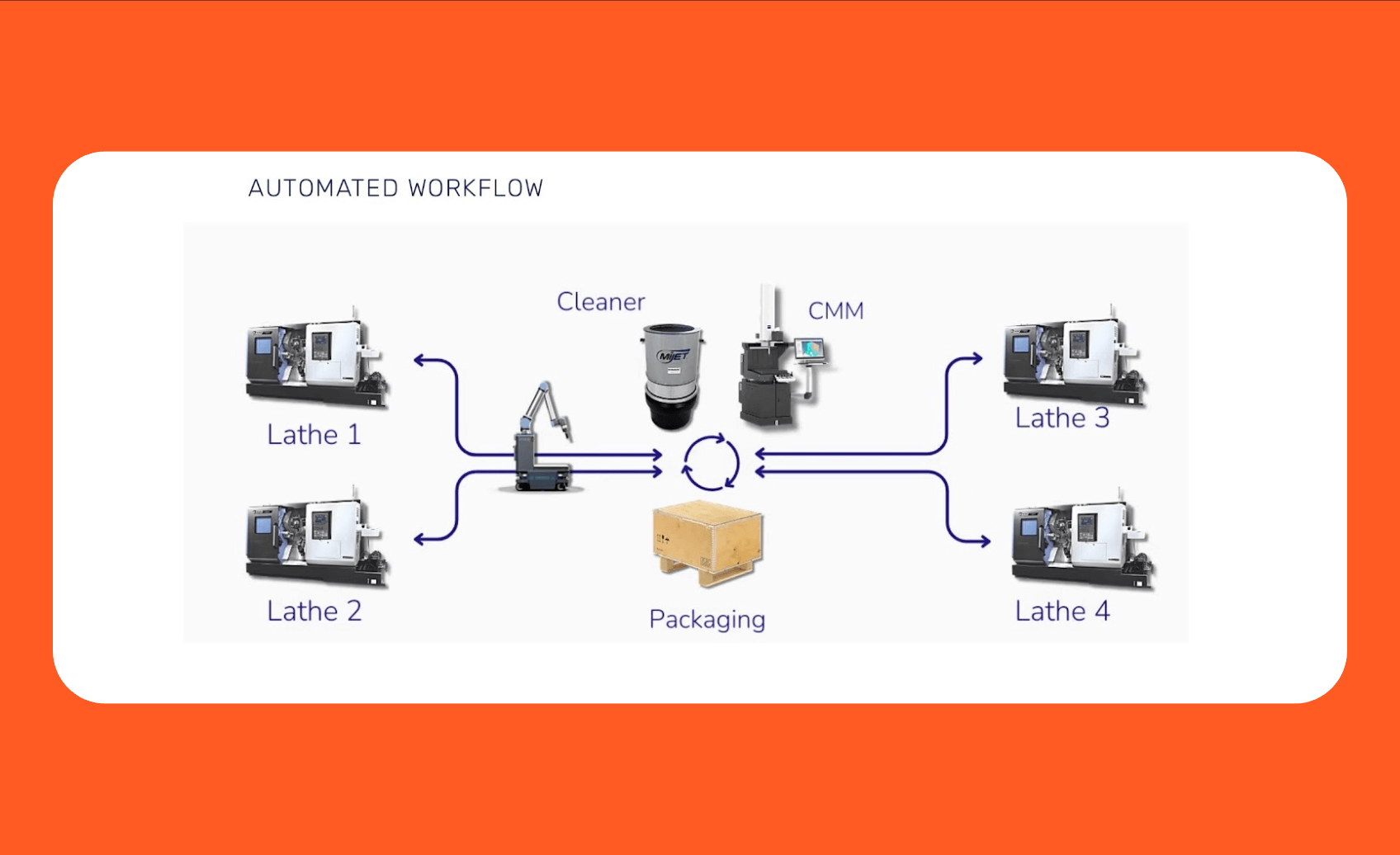
A single tending robot can serve more than one workstation when machines are positioned within its reach. Real deployments show one robot reliably tending three stations from a fixed location, coordinated by the plant MES for uninterrupted 24/7 operation.
Integrators also document multi-machine setups where one robot is programmed to load and unload several CNCs in high-mix, low-volume environments to optimize OEE and reduce idle time. This approach raises throughput without adding operators, as seen in case studies that report 33% production gains after automating CNC tending with a robot cell.
Palletizing and post-process handling

Downstream of machining, tending robots commonly palletize finished parts or route them to inspection and packaging. Modular palletizing cells are widely used to standardize this step across plants, letting manufacturers scale units over time while keeping cycle times predictable.
These patterns reflect a broader industry practice where palletizing is the final link in an automated flow from CNC to shipping, reducing errors and improving overall throughput.
Applications and use cases of machining robots
The main applications of machining robots include deburring, polishing, drilling, and finishing operations. These robots perform material-removal tasks directly on parts, helping manufacturers replace multiple machines with one flexible system.
Deburring and trimming

Machining robots are used to remove burrs, flash, and excess material from machined or cast components. Equipped with grinding or brushing end-effectors, they follow programmed paths to smooth edges and maintain part accuracy.
A KC Robotics case study describes improved consistency on cast parts after switching to robotic deburring. Robots like Core can also handle similar finishing tasks for small parts in metal and plastic manufacturing, using adaptive motion control to maintain constant force and avoid surface damage.
Surface finishing and polishing

Surface finishing robots use force feedback and real-time path correction to polish complex geometries. This is especially valuable in industries such as aerospace, medical devices, and consumer goods manufacturing, where surface quality directly affects performance and appearance.
A 2024 paper shows uniform polishing on fiberglass wind-turbine blades using AI path planning and force control. The same principles are applied in aerospace component finishing and mold polishing, where human consistency is hard to achieve at scale.
Robotic drilling and tapping
Machining robots equipped with spindle end-effectors can perform drilling and tapping tasks on metals, composites, and hybrid materials. They are especially effective when holes need to be drilled at varying angles or positions that fixed CNC setups can’t easily reach.
In aerospace manufacturing, companies use six-axis robots to drill composite fuselage panels and engine nacelles, maintaining high positional accuracy while reducing setup time.
Hybrid and post-processing operations
In integrated manufacturing cells, machining robots perform finishing, drilling, or polishing immediately after a CNC cycle or additive manufacturing process. These hybrid setups reduce part transfers, inspection time, and overall floor space requirements.
For example, in mold-making industries, hybrid machining cells combine milling, polishing, and inspection tasks into a single workflow. This approach reduces lead times and lowers tool-change frequency, enabling manufacturers to deliver high-precision dies and molds more quickly.
Composite trimming and contouring
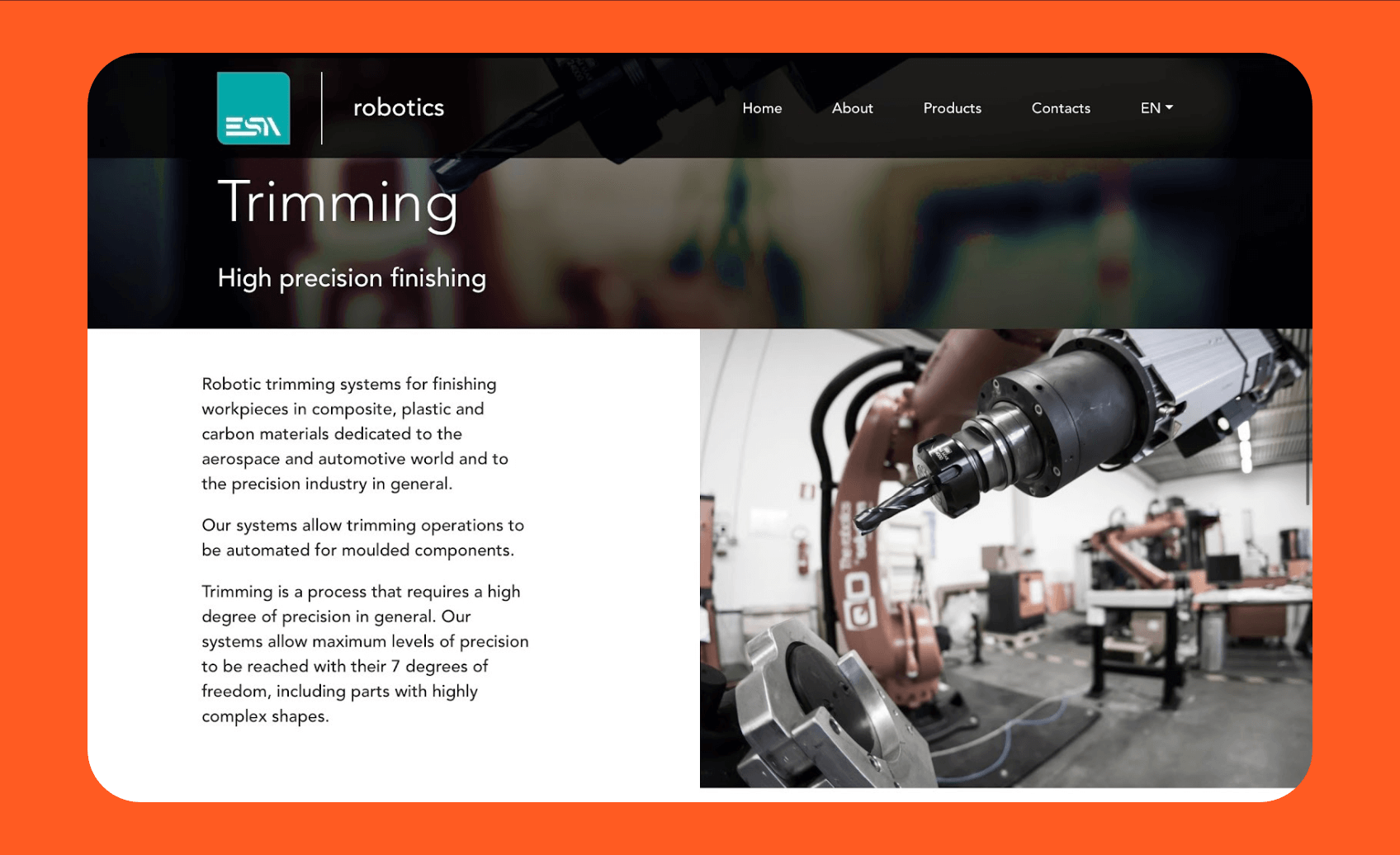
In aerospace and wind energy manufacturing, robots are used to trim carbon-fiber composites or thermoset molds. Their six-axis flexibility allows for complex contouring without distorting fibers or compromising structural integrity.
Major OEMs like Boeing and Airbus suppliers use robotic trimming systems to replace manual cutting operations, improving both consistency and safety.
How to choose between tending and machining robotics
Choosing between tending and machining robotics depends on your production needs, part tolerances, and available expertise.
- Part complexity and tolerance requirements: Machining robots handle tasks with moderate tolerances (±0.03 mm to ±0.1 mm), ideal for trimming or finishing complex surfaces. If your workflow demands tighter precision, dedicated CNCs supported by tending robots are the better fit.
- Production volume: For high-volume, repetitive work, tending robots deliver faster ROI through continuous machine operation. Machining robots suit low-volume or mixed-model runs where flexibility outweighs speed.
- Tooling and integration costs: Tending systems typically integrate with existing CNCs using standard I/O or Modbus interfaces. Machining setups need spindle integration, CAM software, and vibration monitoring, raising upfront investment.
- Operator skill level: Machine tending robots use no-code or hand-guiding interfaces that floor technicians can manage. Machining robots require experienced programmers familiar with path control, tool compensation, and process calibration.
- Available floor space: Machining robots can consolidate operations and save space compared to multiple standalone machines. However, if the facility already has fixed CNC lines, adding tending robots is more practical.
- Scalability and ROI: Consider long-term automation goals. If your production may expand into multi-station or hybrid setups, investing in a modular robotic platform like Standard Bots Core for tending or Thor for heavy-duty machining assistance ensures scalability without new infrastructure.
Common challenges and considerations in robotic machining and tending
The common challenges and considerations in robotic machining and tending include vibration control, calibration accuracy, tool wear, and software integration.
- Vibration, chatter, and deflection: Machining robots face stability challenges during cutting or grinding. Even slight vibrations can affect surface finish or dimensional accuracy.
- Tool wear and automatic tool changes: Continuous operation increases tool wear, especially during deburring and polishing. Automated tool-change systems and torque monitoring help maintain cutting quality and reduce downtime.
- Calibration drift and temperature effects: Thermal expansion or joint fatigue can cause small shifts in robot positioning over time. Regular calibration against fixed reference points is essential, especially for machining applications that demand sub-millimeter precision.
- Integration and spindle control: Robotic machining requires smooth coordination between the robot arm, spindle, and control software. Poorly synchronized systems can lead to inconsistent feed rates or overcutting.
- Maintenance and safety compliance: Indnustrial robots must comply with ISO 10218 and ISO/TS 15066 safety standards for collaborative operations. Scheduled preventive maintenance covering lubrication, joint inspection, and sensor recalibration keeps cells safe and operationally stable.
- Environmental exposure: Machining environments involve coolant, chips, and fine dust. Robots must be rated with suitable ingress protection (typically IP54 or higher) and built with sealed joints and corrosion-resistant materials to ensure durability.
Summing up
Machining and machine tending robots are changing how factories work. Machine tending robots keep machines running nonstop by loading and unloading workpieces, whereas machining robots focus on precise cutting, drilling, and polishing. Together, they close the gap between manual labor and full automation.
Machine tending robots bring speed, uptime, and safety. Machining robots add flexibility and accuracy where traditional tools fall short. Across industries, automation is being implemented right now to solve real production challenges. Standard Bots’ solutions are part of this shift, helping manufacturers simplify day-to-day operations while cutting downtime.
Next steps with Standard Bots’ robotic solutions
Looking to upgrade your automation game? Standard Bots Thor is built for big jobs, while Core is the perfect six-axis cobot addition to any machining or tending setup, delivering unbeatable precision and flexibility.
- Affordable and adaptable: Core costs $37k. Thor lists at $49.5k. Get high-precision automation at half the cost of comparable systems.
- Perfected precision: With a repeatability of ±0.025 mm, both Core and Thor handle even the most demanding machining or tending operations.
- Real collaborative power: Core’s 18 kg payload conquers CNC loading and finishing, while Thor’s 30 kg payload manages heavy-duty metal parts.
- AI-driven simplicity: Equipped with advanced demonstration learning and real-time adaptation through Standard Bots' vertically integrated AI platform, Core and Thor integrate smoothly with manufacturing operations for flexible automation.
- Safety-first design: Machine vision and collision detection mean Core and Thor work safely alongside human operators.
Schedule your on-site demo with our engineers today and see how Standard Bots Core and Thor can bring AI-powered precision to your shop floor.
FAQs
1. What are machining robots, and what do they do?
Machining robots are robotic arms designed to perform cutting, drilling, grinding, or polishing operations directly on workpieces. They remove or finish material with precision, handling tasks like trimming, deburring, and surface polishing that were once done manually or on fixed CNC machines.
2. How is a machining robot different from a machine tending robot?
A machining robot differs from a machine tending robot in its function. While a machining robot performs the actual cutting or finishing work, a tending robot focuses on loading, unloading, and transferring parts between machines to keep production continuous.
3. Can one robot perform both machining and tending tasks?
Yes, one robot can perform both machining and tending tasks when configured with interchangeable tools and the right control software. Hybrid robotic cells are increasingly common, allowing a single robot to load a CNC machine, perform secondary machining, and move parts through finishing stages.
4. What are the main advantages of robotic machining?
The main advantages of robotic machining include flexibility, precision, and process consolidation. A single robotic arm can perform multiple operations like drilling, sanding, and polishing on complex geometries, reducing setup time and improving throughput compared to dedicated machines.
5. What precision can machining robots achieve?
Machining robots can achieve precision levels between ±0.05 mm and ±0.1 mm, depending on the tool, spindle quality, and control calibration. This accuracy suits tasks like deburring, trimming, and finishing, where consistent results are more critical than ultra-tight tolerances.
6. What industries benefit most from machining robotics?
Industries that benefit most from machining robotics include automotive, aerospace, metal fabrication, and plastics manufacturing. These sectors rely on robotic machining for repetitive finishing, trimming, and inspection tasks that demand precision, uptime, and operator safety.
brighter future

Join thousands of creators
receiving our weekly articles.