Degrees of freedom in robotics are the number of independent movements a robot can make, either by shifting position or rotating around an axis. Robots move in two main ways: translational (straight line) and rotational (spinning or turning).
Each joint or axis adds one degree of freedom, similar to how your shoulder, elbow, and wrist work together to move your arm. A 6–axis robot arm, for instance, can bend, reach, and rotate to handle complex tasks. From industrial arms to drones, understanding DOF explains why some robots move with surprising precision while others feel more limited.
How degrees of freedom work in robotic arms
Robotic arms don’t just move randomly. Every joint in an arm adds a specific type of movement. The more joints and axes a robotic arm has, the more it can adapt to its environment.
Whether it’s a simple turn or a complex, multi-angle motion, DOF gives robots the movement capabilities to match the task.
Here’s a breakdown of how DOF works at different levels:
- 1 DOF (One degree of freedom): With just one degree of freedom, a robot can rotate a single joint, like turning a gripper left or right. It’s limited to changing orientation in place, making it useful for straightforward tasks like flipping objects or aligning parts. These setups are often found in packaging lines or bottle capping machines, where only a single, repeated motion is required.
- 3 DOF (Three degrees of freedom): A robot with three degrees of freedom can move along the basic axes of a 3D space: forward and back, side to side, and up and down. It can reach any point within its range, but can’t rotate or angle its tool. You’ll see this in machines like 3D printers or simple CNC plotters, where the tool just needs to move to the right position to draw, cut, or print.
- 6 DOF (Six degrees of freedom): With six degrees of freedom, a robot has full control over both position and orientation, so it can reach a target from almost any angle. It’s the standard setup for most industrial robots, especially in tasks like welding, assembly, and material handling, where both movement and precise tool angles matter. You can see how they’re used on the factory floor by checking out this guide on 6-axis robots in mechanical engineering.
- 7 DOF (Seven degrees of freedom): The seventh degree of freedom offers more flexibility by allowing alternative paths to reach the same point. It’s similar to how your arm can adjust slightly to reach around an object or avoid a collision. You’ll see this in humanoid robots like Toyota’s T-HR3 or NASA’s Robonaut, and in surgical robots that need precise movement around delicate areas.
In short, degrees of freedom define how a robot moves and how versatile it can be. More DOF means more options, but only if the task requires it. As robot designs evolve, so will the way we use movement.
How to calculate DOF in a robotic system
Calculating degrees of freedom (DOF) is mostly straightforward, especially for serial robots. Here's how to approach it:
1. Count independent joint movements
- The simplest way to calculate DOF is to count how many joints can move independently.
- Each joint that slides, rotates, or pivots adds one DOF
- For example, if a robot arm has six independently controlled joints, it has 6 DOF.
- This method applies to most industrial arms and is enough for typical automation use cases
2. Use Grübler–Kutzbach for complex systems
For mechanisms with more complicated linkages, like parallel robots or closed kinematic chains, engineers use the Grübler–Kutzbach criterion.
This formula considers:
- Number of links
- Number of joints
- Movement constraints
While it's essential for advanced system design, it provides more detail than necessary for evaluating standard 6-axis arms.
3. Understand DOF vs. axes
Example: A standard 6-axis robot arm
- 3 joints for positioning: base, shoulder, and elbow
- 3 joints at the wrist for tool orientation
- Each joint moves independently, hence 6 DOF in total.
- This setup allows full control of the tool’s position and angle in 3D space.
Why DOF matters in robot design
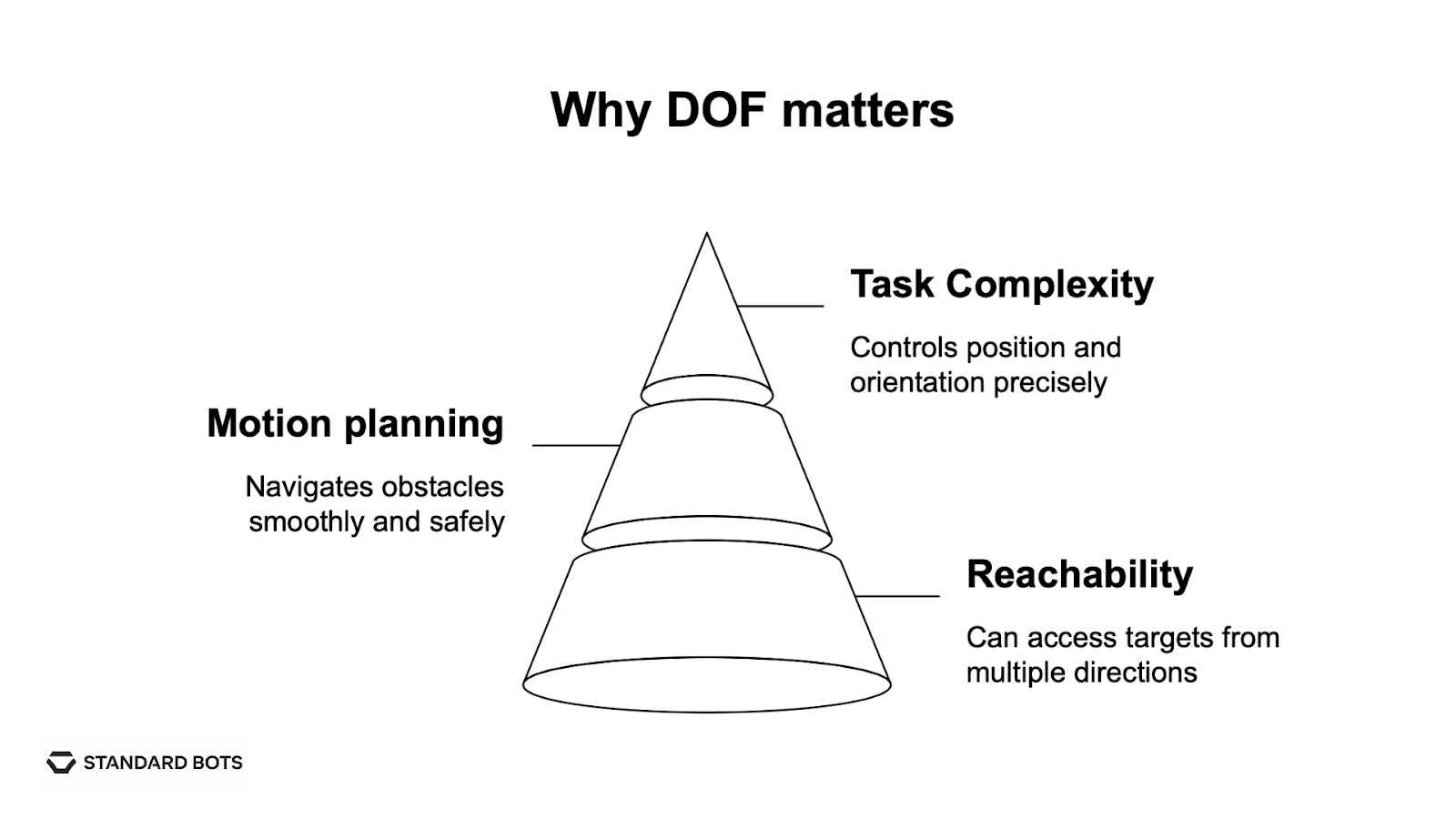
Degrees of freedom directly influence what a robot can do and how well it can adapt to its environment. More DOF doesn’t always mean more accuracy, but it does give designers and engineers more flexibility in how a robot performs a task. Here's where that flexibility matters:
Reachability and workspace: A higher-DOF robot can reach targets from more directions. This is important in setups where space is tight or parts are hard to access. Surgical robots, for example, need to navigate around organs and bones. In manufacturing, assembly robots often need to reach inside complex machinery. More DOF helps the arm get there without moving the whole system.
Motion planning and collision avoidance: Extra DOF gives robots more options to move around obstacles. This matters when the workspace is crowded or constantly changing. A robot with limited movement might have to stop or follow a less efficient path. One with more freedom can adjust its joints to take a smoother, safer route.
Task complexity: Some jobs are simple, like moving objects from one spot to another. These don’t need much flexibility, but tasks like welding, painting, or precision assembly require the tool to approach from very specific angles. For that, you need more DOF to control both position and orientation simultaneously.
Redundant degrees of freedom: When is more, better?
A robot is considered redundant when it has more degrees of freedom than the minimum needed to complete a task. This extra movement isn’t wasted; it gives the robot more options for reaching the same point. While not always necessary, redundancy can be a big advantage in the right context. Here's where and why extra DOF can be useful:
Avoiding obstacles
With extra DOF, a robot can choose from multiple paths to reach a target. If one route is blocked or inefficient, it can adjust its joints to go around the obstacle without needing to back out or reset. This is especially useful in environments that change often, like collaborative workspaces or cluttered factory floors.
Working in tight spaces
Redundant arms can reposition themselves without moving their base. That’s a big deal in cramped environments where space is limited. Instead of repositioning the whole robot, the arm can “fold” differently to reach around or between obstacles. This makes tasks more efficient and less disruptive to the surrounding area.
Mimicking human-like gestures
Humans have natural redundancy in their arms; we can reach for something in different ways depending on what’s around us. Robots with redundant DOF can do the same. This makes them more capable in settings where movement needs to feel natural or human–like, such as assistive robots or those working alongside people.
Example: 7 DOF robotic arms
Robotic arms with seven degrees of freedom are commonly used in medical robotics and humanoid systems. The extra joint allows them to maneuver around sensitive anatomy or handle tools with greater nuance.
Minimum DOF for common robotic tasks
You don’t always need a high-DOF robot. Matching the task to the right level of movement saves cost, simplifies programming, and speeds up deployment.
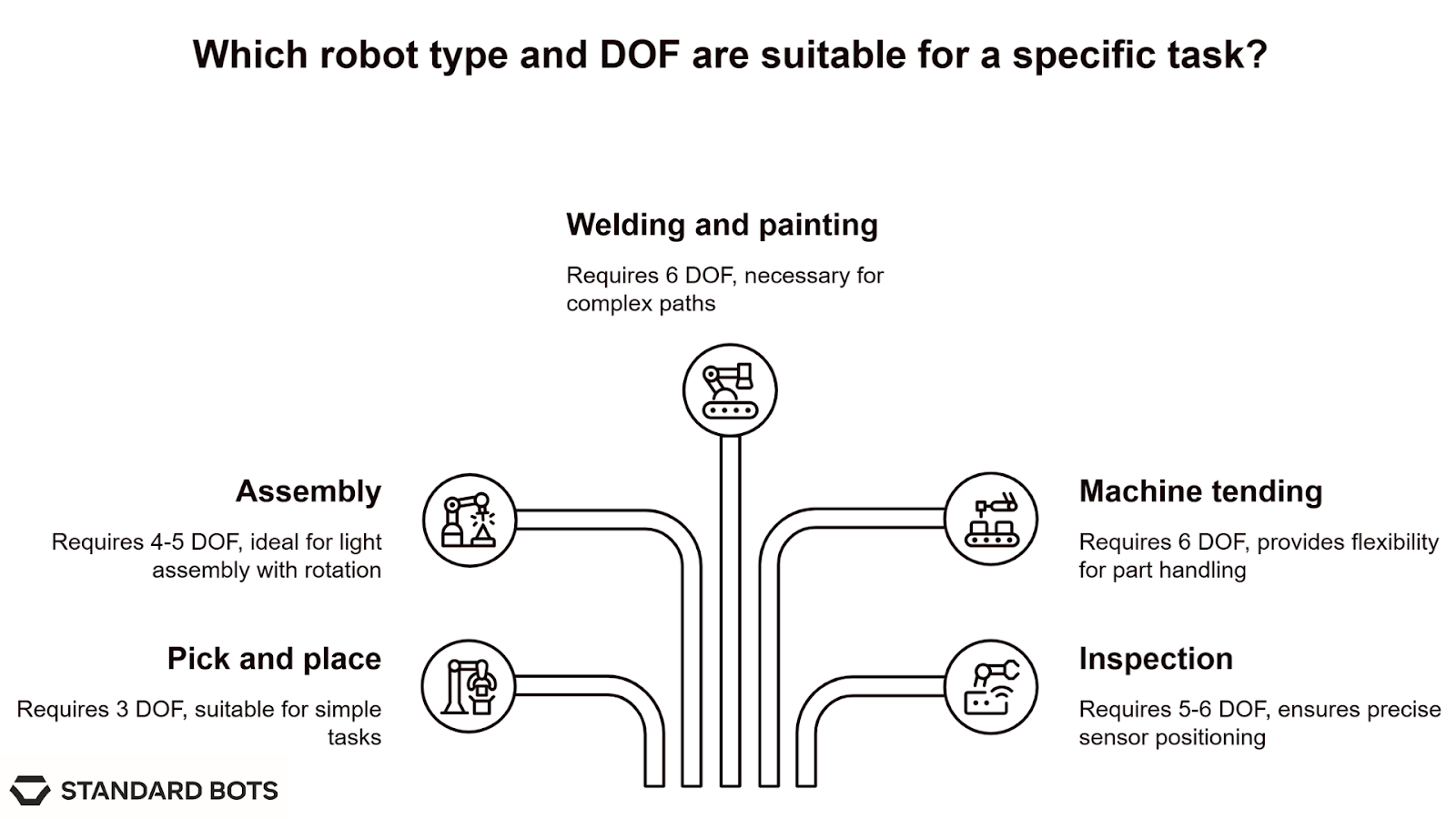
- Pick and place: Simple pick-and-place tasks often need just 3 DOF: X, Y, and Z movement. Cartesian or delta robots are a good fit here.
- Assembly: Light assembly can be handled with 4 to 5 DOF, especially if some basic rotation or alignment is required. SCARA robots are common in these setups.
- Welding and painting: These jobs require full control over position and orientation, so 6 DOF is typically needed to follow complex paths and angles.
- Machine tending: For loading, unloading, and reorienting parts, 6 DOF provides the flexibility to move around doors, fixtures, and tooling.
- Inspection: Most inspection tasks need 5 to 6 DOF to position sensors or cameras at different angles without losing precision.
DOF and robot workspace: What’s the link?
Work Envelope
The number of degrees of freedom directly affects the size and shape of a robot’s workspace, the total volume it can reach, also called its work envelope.
The number of degrees of freedom plays a major role in shaping that space. More DOF doesn’t just help the robot reach further; it helps it reach better. With each added joint, the robot gains new ways to approach a target, often from angles that wouldn’t be possible otherwise.
For example:
- A 4 DOF arm might be able to reach a specific point, but only from one direction.
- A 6 DOF arm could reach that same point from the top, side, or even underneath, depending on how the task needs to be done.
This flexibility matters when working around fixtures, inside enclosures, or on irregular surfaces.
Wrist joints
They don’t expand the overall reach, but they allow the robot to tilt, rotate, or align the tool without moving the whole arm. This matters in tasks like welding, sanding, or part insertion, where the tool needs to be aligned just right.
Without wrist DOF, the robot might have to reposition entirely, or it simply won’t be able to complete the task at all.
Joint limits and mechanical constraints
Each joint has a fixed range of motion, and some combinations of movements may be restricted by collisions or link interference. These physical boundaries define the robot’s joint limits and mechanical constraints.
Even with more DOF, a robot can’t reach beyond its physical structure or rotate past a certain angle. Effective use still depends on smart design, clear motion paths, and understanding what the robot can and can’t physically do.
In short, more DOF gives a robot more ways to use its workspace, but it doesn’t replace good planning.
DOF vs axis: What’s the difference?
The terms degrees of freedom (DOF) and axis are often used interchangeably, but they’re not the same. Knowing the difference is important when comparing robot types or choosing the right system.
An axis refers to a physical direction of motion:
- This can be linear (up, down, forward, backward)
- Or rotational, around a fixed point or axis
- Most robots are described by the number of axes they have, which shows how many directions or types of motion they can produce
Degrees of freedom (DOF) tell you how many of those movements are independent:
- Each DOF is a separate, controllable movement
- In simpler robots, one axis usually equals one DOF
- In more complex systems, not every axis adds an independent movement, so DOF and axis count can differ
Cartesian robot
- 3 axes = 3 DOF
- Moves along three axes: X, Y, and Z
- Each movement is linear and independent
SCARA robot
- Operates in three-dimensional space
- Includes a mix of rotational and vertical motion
- Might have four physical axes but only three independent DOF, depending on how the joints are configured
In simple terms, axes describe the directions a robot can move, while degrees of freedom explain how many of those movements it can control independently. It’s the difference between where it can move and what it can move on its own.
Choose the right robot with the DOF your task demands
Not every task needs a robot with six or more joints. The right number of degrees of freedom depends on what you’re trying to do. More DOF means more flexibility, but also more complexity and cost. The smart move is to match the robot’s motion capabilities to the job; no more, no less.
3 DOF
For basic pick-and-place operations, 3 DOF is often enough. Robots like Cartesian systems or basic delta robots work well here. They can move along X, Y, and Z axes to position parts quickly and accurately, but they don’t handle rotation or orientation changes.
4 DOF
Add a bit of rotation, and you can handle more complex handling tasks. Many SCARA robots fall into this category. They’re ideal for fast, repetitive tasks like PCB assembly or packaging, where orientation is fixed but speed and reliability matter.
6 DOF
This is the standard for general-purpose industrial automation. A 6-axis robot like RO1 or FANUC’s LR Mate series gives you full control over both position and orientation, making them ideal for tasks like welding, painting, machine tending, and part inspection; any task where multi-angle access is needed.
7 DOF and beyond
When flexibility or obstacle avoidance is a priority, 7 DOF systems come into play. Robots like KUKA’s LBR iiwa or Franka Emika arms offer extra freedom to work in tighter spaces or follow more complex paths. These are common in medical robotics, research, and advanced collaborative setups where movement has to be both precise and adaptable.
Underestimating the need can limit performance, while overestimating it can slow you down with extra cost and complexity.
Final Thoughts
Understanding degrees of freedom helps you see how robot motion works and why it matters when choosing or designing a system. From basic pick-and-place setups to highly flexible arms for complex tasks, the number of DOF directly shapes how a robot moves, adapts, and fits into your workflow.
Whether you're selecting a robot for a specific application or planning for future automation, making the right choice starts with understanding what level of movement your task demands. The better the fit, the better the performance, so it pays to get this part right.
Bring 6‑axis precision to your floor
The RO1 by Standard Bots delivers industrial‑grade 6‑axis movement at half the cost of comparable systems. From welding and machine tending to high‑precision assembly, RO1 gives your team the flexibility and accuracy to take on more complex tasks with ease.
- Affordable: Starting at $37K or lease from $5/hour
- Easy to use: No‑code setup, so you can be running in hours
- Versatile: Handles welding, pick‑and‑place, inspection, and more
- Safe: Built‑in vision, force control, and collision detection
Book your free 30‑day trial today.
FAQs
1. How do you calculate the degrees of freedom of a robotic arm?
You can calculate the degrees of freedom of a robotic arm using Grübler's formula or by summing the freedoms provided by each joint. In practice, engineers also consider mechanical constraints and joint coupling, which may reduce the theoretical DOF to a lower practical value.
2. What is the minimum number of DOF required for basic pick-and-place operations?
The minimum number of DOF required for basic pick-and-place operations is three. A three-DOF robot can move an object in three-dimensional space (X, Y, and Z axes), which is sufficient for picking up and placing an object at a new location.
3. Does adding more degrees of freedom always improve a robot’s precision?
No, adding more degrees of freedom to a robot does not always guarantee improved precision, as it introduces potential challenges in control and accuracy. More DOF can increase complexity in calibration and require advanced algorithms to maintain consistent accuracy.
4. Why do some robots include redundant degrees of freedom, and when is it useful?
Some robots include redundant degrees of freedom because they offer increased flexibility and functionality. It can be useful for tasks like avoiding obstacles, optimizing joint configurations, or maintaining stability in the presence of disturbances.
5. How do degrees of freedom affect a robot’s work envelope?
More DOF allows for a larger, more complex, and more accessible work envelope, enabling the robot to perform various tasks and navigate diverse environments. This versatility is especially valuable in manufacturing, surgery, and space robotics, where access to tight or irregular spaces is critical.
6. How many degrees of freedom does a typical humanoid robot have?
Humanoid robots typically have 30 or more degrees of freedom, with six degrees of freedom per arm, five or six in each leg, and several more in the torso and neck. This high number of DOF allows them to mimic human-like motion and interact with complex, dynamic environments.
7. What is the difference between an axis and a degree of freedom in robotics?
In robotics, an axis is a single rotational or translational joint that moves a robot in one direction. A degree of freedom (DOF) is the total number of independent axes or directions of motion a robot has. In other words, DOF measures overall motion capability, while axes describe the individual movement components.
Join thousands of creators
receiving our weekly articles.