Your robot arm hits its limit mid-cycle, or the payload drifts off position by a few millimeters. Production slows, calibration starts again, and downtime adds up. Every manufacturer knows the frustration.
The right motor prevents those issues by delivering the torque, precision, and speed your application demands. Whether you’re building a welding cell or an autonomous robot, motor choice controls how efficiently your system performs.
In this guide, you’ll learn how robot motors work, the main types available, and where each one fits best across modern automation.
8 types of robot motors: At a glance
What are robot motors?
Robot motors are electric motors that power a robot's movements, converting electrical energy into mechanical motion for tasks like lifting, rotating, and moving. They drive a robot's joints, grippers, and positioning systems across manufacturing automation.
Robot motors differ from conventional motors through closed-loop control systems that enable exact positioning. They handle higher duty cycles, executing tens of thousands of precise movements daily.
They also need higher torque density, better thermal management, and resistance to contamination from coolant, metal chips, and dust. These motors maintain accuracy even under temperature extremes and vibration from nearby machinery.
How robot motors work
Robot motors convert electrical signals into rotational force through electromagnetic interaction. Current flows through motor windings, creating magnetic fields that push against permanent magnets, generating torque that drives the output shaft.
The control process follows three steps:
- PWM signals regulate power delivery. The motor drive switches power on and off rapidly, varying the duty cycle, the percentage of time the signal stays active. A 70% duty cycle delivers more power than a 30% cycle.
- Encoders track shaft rotation. These sensors send position and speed data to the controller in real time. PWM frequencies run between 500 Hz and several kHz, fast enough that motor inertia smooths pulses into consistent rotation.
- The controller compares and corrects. If the motor overshoots by 0.05mm, the encoder detects it and the controller issues correction commands within milliseconds.
Two control approaches:
- Open-loop control operates without feedback, relying on predetermined commands. The system assumes the motor reaches its target. Works for simple tasks where precision isn't critical, but can't detect or correct errors like missed steps.
- Closed-loop control uses continuous feedback to maintain accuracy. The system automatically adjusts when conditions change, external forces, load shifts, or unexpected resistance. Robot motors in manufacturing automation run closed-loop for machine tending, welding, and assembly operations.
Types of robot motors
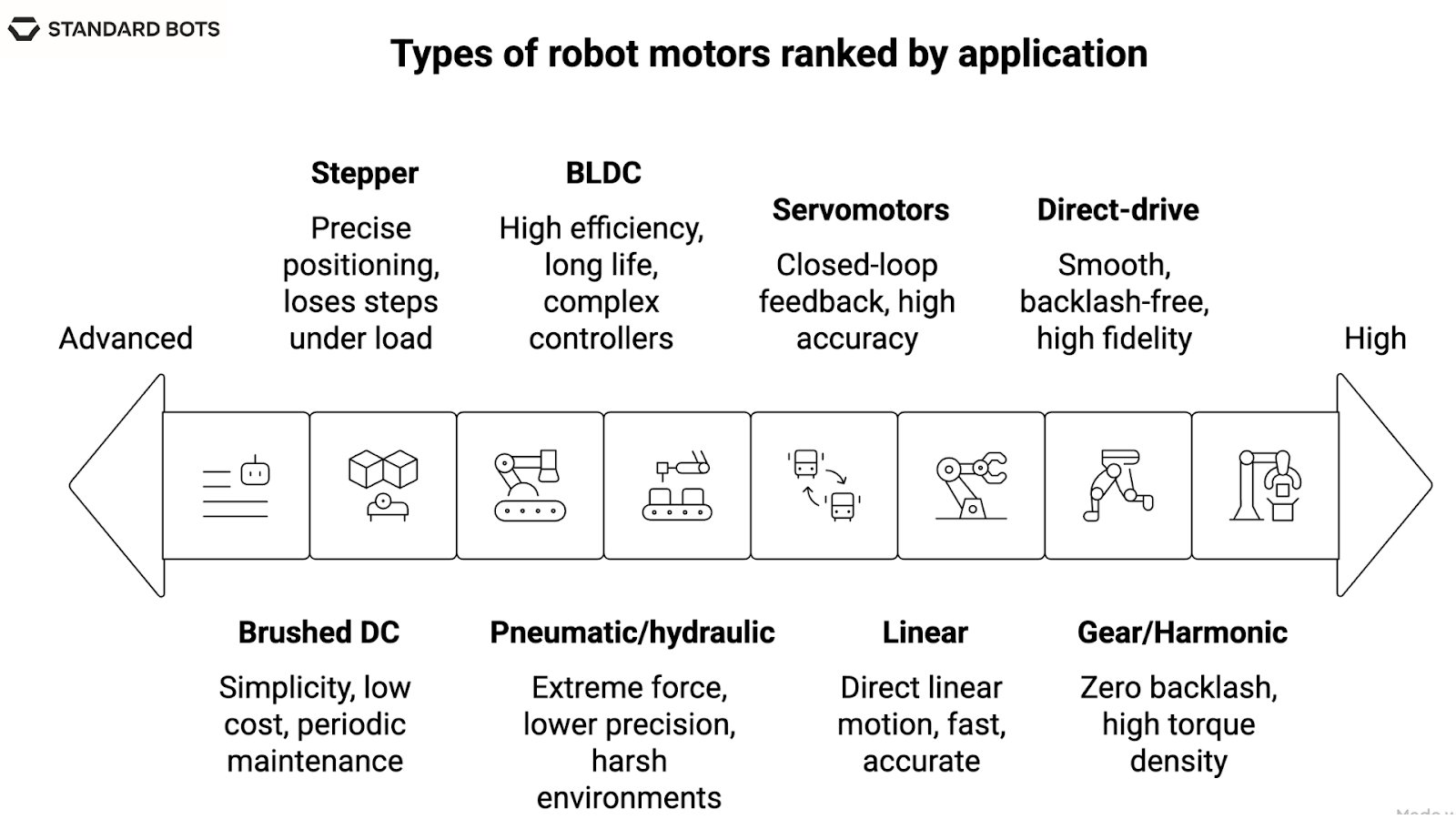
Brushed DC motors
Application: Common in entry-level and mobile robots where simplicity and low cost matter.
Brushed DC motors deliver decent torque at low speeds and offer straightforward voltage-based speed control. They're cost-effective and simple to implement, making them popular in educational robotics and battery-powered applications. The brushes and commutator wear out over time, requiring periodic maintenance.
Brushless DC (BLDC) motors
Application: Ideal for continuous, high-speed robotic motion like conveyor drives or robot joints.
BLDC motors use electronic commutation instead of physical brushes, delivering higher efficiency and longer lifespan. They provide high torque-to-weight ratios and minimal maintenance requirements. The global BLDC motor market in robotics continues growing due to their reliability in industrial automation and precision applications.
Despite requiring more complex controllers than brushed motors, BLDC motors deliver superior performance in demanding continuous-duty cycles.
Stepper motors
Application: Best for robots needing precise incremental positioning such as 3D printers or pick-and-place arms.
Stepper motors move in fixed angular steps without requiring feedback systems for basic positioning. They maintain position without power and offer excellent repeatability for tasks requiring precise step-wise movement.
However, they can lose steps under heavy loads or rapid acceleration, and their torque drops at higher speeds, making them best suited for controlled, moderate-speed applications.
Servo motors
Application: Standard choice for articulated arms requiring high accuracy and closed-loop feedback.
Servo motors combine a DC or BLDC motor with encoder feedback to create closed-loop control systems. The encoder continuously monitors position, speed, and torque, allowing the controller to make real-time corrections. They maintain precise positioning under varying loads, making them essential for robotics, CNC machining, and automated assembly.
Gear and harmonic drive systems
Application: Used where torque amplification and backlash-free motion are crucial, such as robotic wrists and joints.
Harmonic drives and precision planetary gearboxes provide zero-backlash operation with high torque density. Harmonic gearing uses a wave generator, flexspline, and circular spline to achieve high reduction ratios in compact packages. Zero-backlash designs eliminate play between gear teeth, ensuring stable torque transmission and smooth joint rotation.
Direct-drive and torque motors
Application: Deployed in collaborative and medical robots that demand smooth, backlash-free operation.
Direct-drive torque motors connect directly to the load without gearboxes, eliminating backlash and mechanical transmission losses.
These motors provide high torque with exceptional motion fidelity and minimal maintenance since there are no wearing transmission elements. The direct coupling results in improved dynamic performance and eliminates long-term drift and elasticity.
Pneumatic and hydraulic actuators
Application: Employed in heavy-duty industrial robots requiring extreme force or operation in harsh environments.
Pneumatic actuators use compressed air, whereas hydraulic systems use pressurized fluid to generate motion. They deliver excellent power density and handle heavy loads that can overwhelm electric motors. However, they offer lower positional precision than electric systems and require additional infrastructure like compressors or hydraulic pumps.
These motors are best suited for applications prioritizing force over fine control, such as material handling and heavy assembly operations.
Linear motors
Application: Used where straight-line motion is essential, such as linear stages or robotic transport systems.
Linear motors produce direct linear motion without rotary-to-linear conversion components like lead screws or belts. They eliminate backlash and deliver accurate, repeatable travel with fast acceleration.
Common in CNC machines, pick-and-place systems, semiconductor steppers, and Cartesian coordinate robots requiring high-speed linear positioning. The direct-drive approach reduces maintenance and improves system dynamics compared to traditional actuators.
Choosing motors for robot arms
To choose the best motors for robot arms, you’ll need to balance torque requirements, weight distribution, and thermal performance across multiple joints. Each joint demands different motor characteristics based on its position in the kinematic chain and the loads it must handle.
- Torque density matters: Motors closer to the base handle heavier loads and benefit from gear reduction to amplify torque. Distal joints like wrists use lighter, direct-drive motors to reduce the inertial load that shoulder and elbow motors must accelerate.
- Heat management becomes critical in continuous-duty applications. Motors generate heat during operation, and inadequate cooling degrades performance or causes thermal shutdown. Brushless motors typically handle thermal stress better than brushed alternatives.
- Motor-gear pairing determines performance: Harmonic drives offer zero backlash for precise positioning. Planetary gearboxes provide high torque in compact packages. High-resolution encoders (often 14-bit or higher) enable accurate position feedback for closed-loop control.
- Safety systems include torque limiting and stall detection to prevent damage during collisions or unexpected loads, particularly important in collaborative robots working near humans.
Selection process
- Define payload and reach requirements
- Calculate torque per joint based on load and arm geometry
- Choose motor type (servo, BLDC, or direct-drive)
- Match appropriate gearbox ratio
- Validate thermal performance and speed capabilities
Examples of robot motor applications across industries
Robot motors drive robotic arms on factory floors, move materials in warehouses, and enable precision tools in healthcare and agriculture. Across industries, these motors convert control signals into accurate, consistent motion that keeps operations efficient.
Manufacturing arms: High-torque BLDC with harmonic drives
Industrial robot arms, such as those from FANUC, often use brushless DC motors with harmonic-drive gearboxes for precision assembly, welding, and machine tending. The zero-backlash gearing provides repeatable positioning over millions of cycles.
BLDC motors deliver continuous operation without brush maintenance, making them ideal for 24/7 production environments where downtime is costly.
Mobile robots: Geared DC for traction
Autonomous mobile robots and AGVs from companies like MiR (Mobile Industrial Robots) use geared wheel drives with encoders for precise traction and navigation. Planetary gearboxes amplify motor torque for moving heavy payloads across warehouse floors.
The gear reduction allows compact motors to deliver the pulling force needed for pallet transport while maintaining battery efficiency during multi-shift operation.
Service and cobots: Servo motors for safe collaboration
Cobots like Standard Bots Core use servo motors with integrated encoders and closed-loop control for precise, safe operation. The encoder feedback enables accurate positioning and real-time force monitoring, allowing the robot to detect contact and stop immediately when encountering resistance.
This combination of precision control and safety features makes servos ideal for collaborative applications where humans and robots work side by side.
Other applications
- Educational platforms and research robots use stepper motors or affordable servos like Dynamixel actuators for learning applications without industrial-level costs.
- Medical surgical robots deploy high-precision servo systems with sub-millimeter repeatability for minimally invasive procedures.
- Agricultural robots use brushless motors for mobility and stepper-controlled actuators for precision tasks like seed placement and crop harvesting.
- Underwater exploration vehicles use sealed brushless motors with corrosion-resistant housings for thruster systems operating in saltwater environments.
- Industrial robots often use AC motors for high-power, stationary tasks in manufacturing and automation.
- Piezoelectric motors enable ultra-precise motion in micro-robots, scientific instruments, and medical devices.
Common challenges and best practices
Robot motors face issues like thermal management, mechanical backlash, power supply instability, electromagnetic interference, and calibration drift. Addressing these challenges during system design prevents failures and maintains positioning accuracy over time.
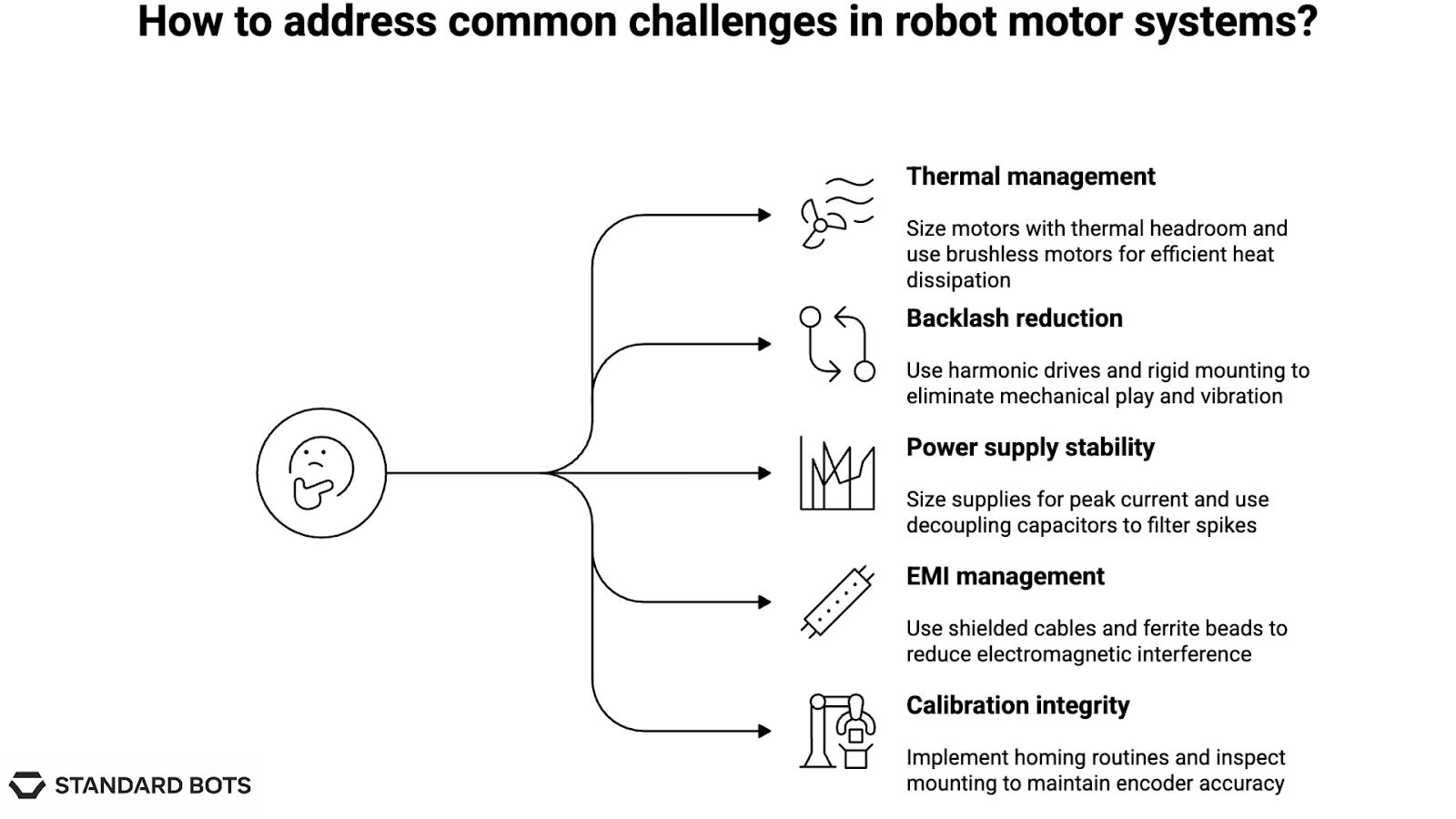
- Balancing torque vs. heat: Motors generate heat proportional to current draw, and excessive temperature triggers thermal shutdowns. Size motors with 20 to 30% thermal headroom above continuous requirements. Brushless motors dissipate heat more efficiently than brushed alternatives for sustained operation.
- Reducing backlash and vibration: Backlash creates positioning errors in closed-loop systems. Harmonic drives and zero-backlash gearboxes eliminate mechanical play, while rigid mounting prevents vibration transmission. High-resolution encoders and microstepping smooth motion, reducing resonances.
- Ensuring power supply stability: Voltage sags during acceleration cause position errors and reduced torque. Size supplies for peak current draw, not continuous operation. Decoupling capacitors filter transient spikes, and regenerative braking requires dissipative resistors or bidirectional supplies.
- Managing EMI and cabling: PWM switching generates electromagnetic interference that disrupts encoder signals. Shielded twisted-pair cables reduce noise pickup. Separate power and signal cables by 50mm minimum, and use ferrite beads to suppress high-frequency EMI without affecting control integrity.
- Maintaining calibration and feedback integrity: Encoder alignment drift causes positioning errors over time. Implement periodic homing routines to reset reference points, and inspect mounting for looseness or bearing wear. Dust contamination on optical encoders degrades signal quality.
Summing up
Robot motors convert electrical energy into mechanical motion, powering manufacturing arms, mobile platforms, and collaborative systems. The main types include brushed DC, brushless DC, stepper, servo, and specialized systems like harmonic drives and torque motors. Each offers distinct advantages based on application needs.
Selecting the right motor depends on payload, precision, duty cycle, and safety requirements. Manufacturing demands high-torque servos with harmonic drives. Mobile robots need geared DC motors for traction. Collaborative robots require force-sensing servos for safe human interaction.
Common challenges include heat management, backlash reduction, power stability, EMI control, and calibration drift. Proper selection and maintenance ensure reliable performance across industrial automation and robotics applications.
Next steps with Standard Bots’ robotic solutions
Looking to upgrade your automation game? Standard Bots Thor is built for big jobs, while Core is the perfect six-axis cobot addition to any automation setup, delivering unbeatable precision and flexibility.
- Affordable and adaptable: Core costs $37k. Thor lists at $49.5k. Get high-precision automation at half the cost of comparable robots.
- Perfected precision: With a repeatability of ±0.025 mm, both Core and Thor handle even the most delicate tasks.
- Real collaborative power: Core’s 18 kg payload conquers demanding palletizing jobs, and Thor’s 30 kg payload handles heavy-duty operations with ease.
- AI-driven simplicity: Equipped with advanced demonstration learning and real-time adaptation through Standard Bots’ vertically integrated AI platform, Core and Thor integrate smoothly with CNC operations for flexible automation.
- Safety-first design: Machine vision and collision detection mean Core and Thor work safely alongside human operators.
Schedule your on-site demo with our engineers today and see how Standard Bots Core and Thor can bring AI-powered greatness to your shop floor.
FAQs
1. What are robot motors used for?
Robot motors are used to convert electrical energy into mechanical motion for robotic joints, grippers, and drive systems. They power applications including manufacturing assembly, welding, machine tending, pick-and-place operations, mobile robot navigation, collaborative tasks, and precision positioning.
2. Which motor type is best for robot arms?
Servo motors are the best motor type for robot arms requiring precision and closed-loop control. They combine DC or BLDC motors with encoder feedback for accurate positioning under varying loads. Industrial arms typically pair servos with harmonic drives for zero-backlash operation.
3. How do I calculate torque for a robot joint?
Calculate torque for a robot joint by multiplying the load mass by gravitational acceleration, the distance from the joint to the load's center of mass, and a safety factor. Account for the motor's gear ratio, friction losses, and acceleration requirements. Include payload weight, gripper mass, and downstream link weights in total load calculations.
4. Are brushless motors better than stepper motors in robotics?
Brushless motors are better than stepper motors in robotics for continuous-duty applications, offering higher efficiency, longer lifespan, and better thermal performance. Steppers provide simpler open-loop positioning without encoders but lose torque at higher speeds and can miss steps under heavy loads.
5. How long do robot motors last?
Robot motors can last from 5,000 to 30,000+ hours, though this varies based on factors such as motor type, duty cycle, and operating conditions. For example, servo motors typically last 5 to 15 years in well-maintained industrial robots.
brighter future

Join thousands of creators
receiving our weekly articles.